デジタル創造技術科
電子情報コース
「電子技術」「情報技術」「通信技術」を学びます。
世の中では、loT(lnternet of Things:モノのインターネット)やAI(人工知能)、ビッグデータ、5G(第5 世代移動通信システム)など新しい技術が次々と導入されてきています。
電子情報技術科ではスマートフォンをはじめカーナビ、ディジタルカメラ、AV機器など身の回りの電子機器に使われている組込みシステムの開発に携わる実践技術者の育成に取り組んでいます。組込み分野はものづくりのすべての要素が絡んでいるため習得する内容は幅広く、それらの基礎となる周辺技術を理解していくことは本校での訓練目標である産業を担う実践技術者を育成することにとって避けては通れない道です。
そこで、電子情報技術科では組込み分野で必要とされるソフトウェアやOS(Operating System) 技術、さらにはハードウェアにも重点を置き、電子回路の設計から製作や回路設計・製作に不可欠となる電子デバイス、マイコンに関する知識・技術を身につけます。
また、ICT 社会では家電製品だけでなく食料品などの商品の値札やさらには洋服などの日用品にまでコンピュータが組込まれ、あらゆるものがインターネットに接続されていきます。これらの技術に対応できる人材を育成するため、組込み技術と無線通信技術を連携させた機器の設計・製作などについても学習していきます。
以上のように電子情報技術科では組込みシステムやICT 社会に対応でき、ハードウェアとソフトウェアの融合分野を担うことができ、かつ未来の生活を豊かにできる実践技術者の育成を目指します。
電子情報技術科で学ぶ内容
1年次
- ものづくり製作テーマ:ライントレースカーをつくろう!/目的:ものづくりの楽しさを体験自分で考えることで得られる達成感
- 電子技術電子回路の基礎から回路・基板の設計製作・測定技術を学びます。(マイクロコンピュータ工学実習、電気電子工学実験など)
- 情報技術プログラミングの基礎からソフトウェア設計・制作技術を学びます。(組込みソフトウェア基礎実習、システム分析・設計実習など)
- 通信技術ネットワークの構成機器や基礎技術について学びます。(情報通信工学実習、情報通信工学など)
2年次
- 電子技術インターフェース回路設計やディジタル回路設計の応用技術について学びます。(電子回路設計製作実習、インターフェース製作実習など)
- 情報技術信頼性と効率を求めるプログラム設計や、組込みシステムの応用技術について学びます。(データ構造・アルゴリズム実習、組込みソフトウェア応用実習など)
- 通信技術ネットワークの管理・構築の応用技術について学びます。(ネットワーク技術、移動体通信技術など)
- 組込み機器製作ロボットを制御するアプリケーション設計から、マイクロコンピュータとのインターフェース回路を製作します。
- 総合制作5人程度のグループに分かれてテーマを決め、問題・解決を繰り返しながら1年をかけて制作物を作っていく実習です。
充実した実験・実習設備
実験・実習機材は、基本的に1人1台の体制を整えています。整備台数の少ない機材は、1クラスをいくつかのグループに分割して、数種の実習をローテーションすることで1人1台体制を実現しています。更に、最新機器の更新と新規機器の導入を継続しています。加えて、実際のものづくりの現場を想定した実践的な実習環境を構築しています。
学科
- 電子技術
- 電磁気学
- 電気回路
- 電子回路
- 電子工学
- アナログ回路技術
- ディジタル回路技術
- センサ工学
- 情報技術
- データ構造とアルゴリズム
- マイクロコンピュータ工学
- 計測制御技術
- 組込みシステム工学
- インターフェース技術
- 組込みオペレーティングシステム
- 組込みソフトウェア技術
- ファームウェア技術
- 通信技術
- 情報通信工学
- ネットワーク技術
- その他学科科目
- 電子情報数学
- 生産工学
- 安全衛生工学
- 環境エネルギー概論
実技
- 電子技術
- アナログ回路基礎実習
- ディジタル回路基礎実習
- 電子回路設計製作実習
- 情報技術
- 組込みソフトウェア基礎実習
- 組込みソフトウェア応用実習
- マイクロコンピュータ工学実習
- ファームウェア実習
- インターフェース製作実習
- 組込み機器製作実習
- 計測制御実習
- データ構造・アルゴリズム実習
- 通信技術
- 情報通信工学実習
- その他学科科目
- 電気電子工学実験
- ものづくり製作実習
- システム分析・設計実習
- 機械工作実習
- 総合制作実習
- DXと関連技術
実験実習装置
- マイコン開発システム
- FPGA開発システム
- 自律型走行ロボット
- 電子回路CAD/CAM システム
- ディジタルマイクロスコープ
- 3Dプリンタ
- プリント基板加工機
- Android開発用タブレット
- ディジタルオシロスコープ
- ファンクションジェネレータ
- LCRハイテスタ
- RFシグナルジェネレータ
- スペクトラムアナライザ
- ネットワーク構築実習装置
- 光通信実習装置
- シーケンス制御実習装置
シラバス
| 区分 | 教科の科目 | 授業科目 | コード | 合計 | 一 年 | 二 年 | 標準 | 備考 | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 前期 | 後期 | 前期 | 後期 | |||||||||||
| 単位 | 第1 | 第2 | 第3 | 第4 | 第5 | 第6 | 第7 | 第8 | ||||||
| 一般教育科目 | 人文科学 | キャリア形成概論 | ER0301 | 2 | 1 | 1 | ○ | |||||||
| 社会科学 | 職業社会概論 | ER0302 | 2 | 1 | 1 | ○ | ||||||||
| 自然科学 | 数学 | ER0303 | 2 | 1 | 1 | ○ | ||||||||
| 数学演習 | ER0304 | 2 | 1 | 1 | ○ | 選択必須科目 | ||||||||
| 物理 | ER0305 | 2 | 1 | 1 | ○ | |||||||||
| 外国語 | 英語Ⅰ | ER0306 | 2 | 1 | 1 | ○ | ||||||||
| 英語Ⅱ | ER0307 | 2 | 1 | 1 | ||||||||||
| 保健体育 | 保健体育 | ER0308 | 4 | 1 | 1 | 1 | 1 | 受講推奨科目 | ||||||
| 一般教育科目計 | 18 | 4 | 4 | 5 | 5 | 0 | 0 | 0 | 0 | |||||
| 系基礎学科科目 | 電子情報数学 | 電子情報数学 | ER0309 | 3 | 1 | 1 | 1 | ○ | ||||||
| 電気電子工学 | 電磁気学 | ER0310 | 2 | 1 | 1 | ○ | ||||||||
| 電気回路Ⅰ | ER0311 | 2 | 1 | 1 | ○ | |||||||||
| 電気回路Ⅱ | ER0312 | 1 | 1 | |||||||||||
| 電子工学 | ER0313 | 2 | 1 | 1 | ○ | |||||||||
| 電子回路Ⅰ | ER0314 | 2 | 1 | 1 | ○ | |||||||||
| 電子回路Ⅱ | ER0315 | 2 | 1 | 1 | ||||||||||
| 情報通信工学 | 情報通信工学 | ER0316 | 2 | 2 | ○ | |||||||||
| 組込みシステム工学 | データ構造・アルゴリズム | ER0317 | 2 | 1 | 1 | ○ | ||||||||
| 組込みシステム工学Ⅰ | ER0318 | 2 | 1 | 1 | ○ | |||||||||
| 組込みシステム工学Ⅱ | ER0319 | 2 | 1 | 1 | ||||||||||
| 環境・エネルギー概論 | 環境・エネルギー概論 | ER0320 | 2 | 2 | ○ | |||||||||
| 生産工学 | 生産工学 | ER0321 | 2 | 1 | 1 | ○ | ||||||||
| 安全衛生工学 | 安全衛生工学 | ER0322 | 2 | 1 | 1 | ○ | ||||||||
| 系基礎学科計 | 28 | 5 | 6 | 3 | 4 | 2 | 1 | 3 | 4 | |||||
| 系基礎実技科目 | 電気電子工学実験 | ものづくり製作実習Ⅰ | ER0323 | 2 | 2 | 集中授業 | ||||||||
| ものづくり製作実習Ⅱ | ER0324 | 2 | 2 | 集中授業 | ||||||||||
| 電気電子工学実験Ⅰ | ER0325 | 4 | 2 | 2 | ○ | |||||||||
| 電気電子工学実験Ⅱ | ER0326 | 2 | 2 | |||||||||||
| 電子回路基礎実習 | アナログ回路基礎実習 | ER0327 | 2 | 2 | ○ | |||||||||
| ディジタル回路基礎実習 | ER0328 | 2 | 1 | 1 | ○ | |||||||||
| 情報通信工学基礎実習 | 情報通信工学実習 | ER0329 | 2 | 2 | ○ | |||||||||
| 組込みソフトウェア基礎実習 | データ構造・アルゴリズム実習 | ER0330 | 2 | 1 | 1 | ○ | ||||||||
| 組込みソフトウェア基礎実習Ⅰ | ER0331 | 4 | 2 | 2 | ○ | |||||||||
| 組込みソフトウェア基礎実習Ⅱ | ER0332 | 2 | 1 | 1 | ||||||||||
| システム分析・設計実習 | システム分析・設計実習 | ER0333 | 2 | 2 | 集中授業 | |||||||||
| 機械工作実習 | 機械工作実習 | ER0334 | 2 | 2 | ○ | 集中授業 | ||||||||
| 系基礎実技計 | 28 | 9 | 7 | 4 | 2 | 3 | 2 | 0 | 1 | |||||
| 専攻学科科目 | 複合回路技術 | アナログ回路技術 | ER0335 | 2 | 1 | 1 | ○ | |||||||
| ディジタル回路技術 | ER0336 | 2 | 1 | 1 | ○ | |||||||||
| マイクロコンピュータ工学 | マイクロコンピュータ工学 | ER0337 | 2 | 1 | 1 | ○ | ||||||||
| 組込みオペレーティングシステム | 組込みオペレーティングシステム | ER0338 | 2 | 1 | 1 | ○ | ||||||||
| 計測技術 | 計測制御技術 | ER0339 | 2 | 1 | 1 | ○ | ||||||||
| センサ工学 | ER0340 | 2 | 2 | ○ | ||||||||||
| ファームウェア技術 | 組込みソフトウェア応用技術 | ER0341 | 2 | 1 | 1 | ○ | ||||||||
| ファームウェア技術 | ER0342 | 2 | 1 | 1 | ○ | |||||||||
| インタフェース技術 | インタフェース技術 | ER0343 | 2 | 1 | 1 | ○ | ||||||||
| 情報端末・移動体通信技術 | ネットワーク技術 | ER0344 | 2 | 1 | 1 | ○ | ||||||||
| 第4次産業革命と関連技術 | ER0345 | 2 | 1 | 1 | ○ | |||||||||
| 専攻学科計 | 22 | 1 | 0 | 2 | 3 | 6 | 5 | 3 | 2 | |||||
| 専攻実技科目 | 複合回路実習 | アナログ回路実習 | ER0346 | 4 | 1 | 1 | 2 | ○ | ||||||
| ディジタル回路実習 | ER0347 | 2 | 1 | 1 | ○ | |||||||||
| マイクロコンピュータ工学実習 | マイクロコンピュータ工学実習 | ER0348 | 4 | 1 | 1 | 1 | 1 | ○ | ||||||
| 電子回路設計製作実習 | 電子回路設計製作実習 | ER0349 | 4 | 2 | 2 | ○ | ||||||||
| インタフェース製作実習 | インタフェース製作実習 | ER0350 | 4 | 2 | 1 | 1 | ○ | |||||||
| 計測制御実習Ⅰ | ER0351 | 2 | 1 | 1 | ||||||||||
| 計測制御実習Ⅱ | ER0352 | 4 | 1 | 3 | ||||||||||
| ファームウェア製作実習 | 組込みソフトウェア応用実習 | ER0353 | 4 | 2 | 1 | 1 | ○ | |||||||
| ファームウェア実習 | ER0354 | 2 | 1 | 1 | ○ | |||||||||
| 組込み機器製作実習 | 組込み機器製作実習 | ER0355 | 5 | 2 | 3 | ○ | ||||||||
| (総合制作実習) | 総合制作実習Ⅰ | ER0356 | 12 | 3 | 3 | 6 | ○ | |||||||
| 総合制作実習Ⅱ | ER0357 | 9 | 2 | 7 | ||||||||||
| 企業委託実習 | ER0358 | 4 | 2 | 2 | 集中授業 | |||||||||
| 専攻実技計 | 60 | 1 | 3 | 6 | 4 | 9 | 12 | 14 | 11 | |||||
| 一般教育科目計 | 18 | 4 | 4 | 5 | 5 | 0 | 0 | 0 | 0 | |||||
| 系基礎学科計 | 28 | 5 | 6 | 3 | 4 | 2 | 1 | 3 | 4 | |||||
| 系基礎実技計 | 28 | 9 | 7 | 4 | 2 | 3 | 2 | 0 | 1 | |||||
| 専攻学科計 | 22 | 1 | 0 | 2 | 3 | 6 | 5 | 3 | 2 | |||||
| 専攻実技計 | 60 | 1 | 3 | 6 | 4 | 9 | 12 | 14 | 11 | |||||
| 合 計 | 156 | 20 | 20 | 20 | 18 | 20 | 20 | 20 | 18 | 156 | ||||
積極的な技能検定・資格取得にチャレンジ!(主な検定・資格)
- 技能検定 電子機器組立て2級・3級
- 技能検定 電気機器組立て(シーケンス制御作業)2級・3級
- 基本情報技術者試験
- 第一種及び第二種電気工事士
- 情報配線施工技能検定 3級
- 工事担任者 など


企業見学
1年次に企業研究の一環として取り組んでいます。
■2021年度の企業見学先
- 渋谷工業株式会社
- 株式会社白山
- 石川サンケン株式会社
- 鹿島興亜電工株式会社
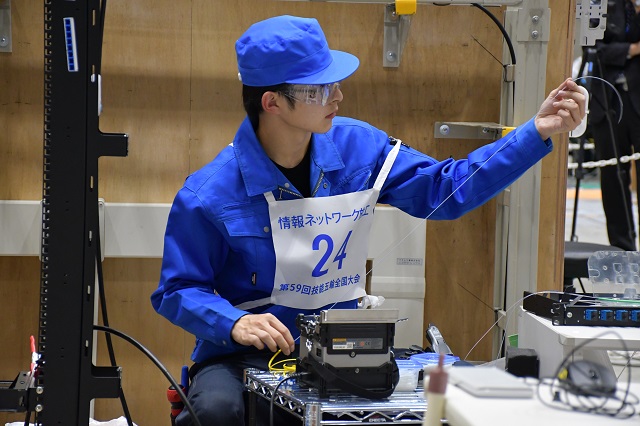
世界大会を目指して
2020年から技能五輪「情報ネットワーク施工」職種に関連した競技大会に挑戦しています。
技能五輪とは、23歳以下が出場できる名前のとおり技能のオリンピックで、機械や電気・電子といったモノづくり分野だけでなく、情報通信関係からサービス・ファッション分野といった職種まで幅広くおこなわれています。
その中でも「情報ネットワーク施工」職種ではテレワークやオンライン授業など生活に欠かすことのできない通信工事に必要なLANケーブルや光ファイバの施工に関わる技術を競います。
作業のスピードと正確さの両方が必要な作業が多いため、今後技術者として活躍するために良い経験になります。

総合制作2021年度総合制作実習・製作物の紹介
2年間の学習の集大成!
総合制作実習とは、2年間で学んだ内容を活かして、数人のグループワークによるものづくり製作実習のことをいいます。学生数名を一つのチームとして、「企画」から「スケジュール」、「設計」、「製作」、「まとめ」という流れで担当の先生とコミュニケーションをとりながら、製作物を作っていきます。最後に、2月に開催される「ポリテックビジョン in 穴水」で成果の発表を行います。
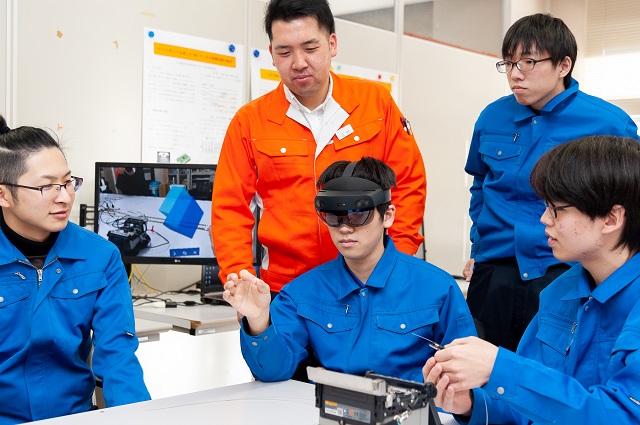
AR(拡張現実)を使った作業支援システムの構築学生数4人
昨年度に引き続き、「情報ネットワーク施工」の作業に関する手順書をAR(拡張現実)を用いて作成しました。今年度はスマートグラスを使用し、現実世界に作業手順を表示し、それを見ながら作業ができるものに改良しました。昨年同様、より実用的な手順書にするために関係企業の方に意見をもらい、手順書に反映させています。

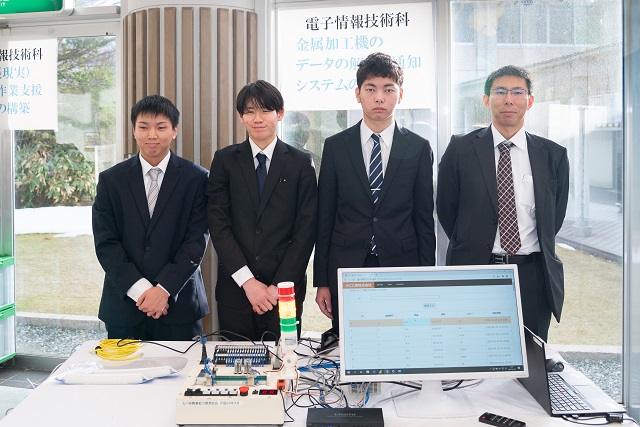
金属加工機のデータの解析と通知システムの開発学生数3人
「工場の見える化」を行うため、金属加工機に取り付けたセンサ情報から稼働状況をクラウド上に送信し、様々な情報をデータベースに登録し、完了や異常の通知を行うシステムを構築しました。民間企業2社にご協力いただき、実際の現場の金属加工機の加工情報をスマートフォンのブラウザやパソコンのBI(ビジネスインテリジェント)ツールを用いて可視化し、「工場の見える化」に向けた取り組みを行いました。

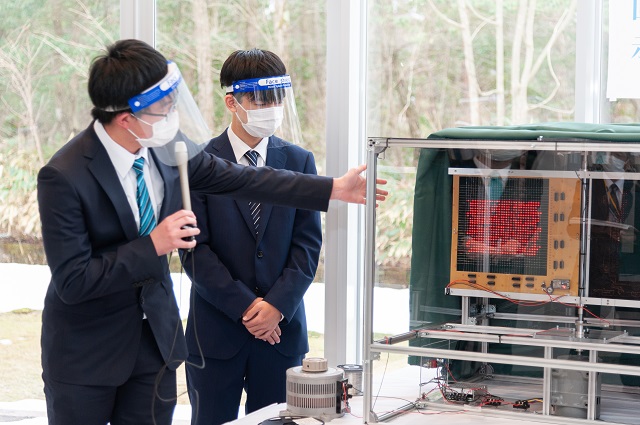
回転式立体表示装置の制作学生数4人
VR技術など立体視を行える装置は様々ありますが、いまひとつ盛り上がっていません。本製作では多くの人が同時に裸眼で立体視を行え、感動を共有できるような装置の製作を目標としました。チップLEDを2次元上に敷き詰めそれを、移動させることにより残像効果を利用して立体を表示させます。

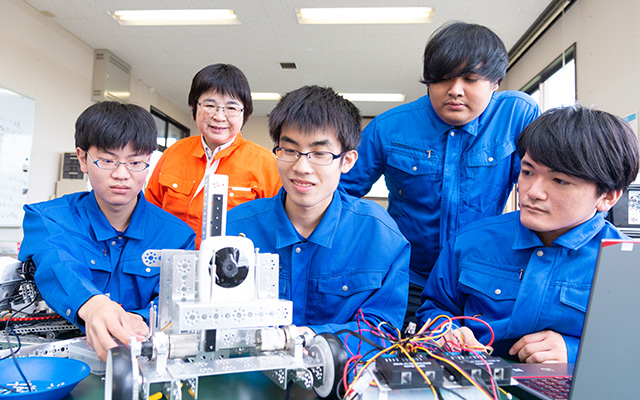
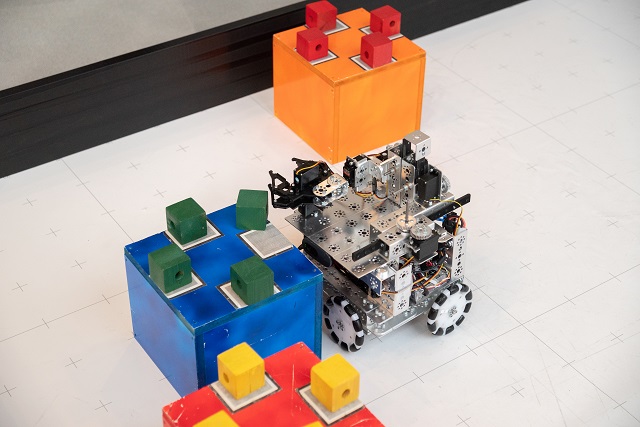
自律型走行ロボットの開発学生数4人
各種センサーやモータ、カメラの制御に関する知識や技術を高める事を目的として、自律型走行ロボットの開発を行いました。また、作成した機体で自律型走行ロボットの競技会の1つであるWRO(WorldRobotOlympiad)Japan ARC(AdvancedRoboticsChallenge)部門のミドル競技とエキスパート競技に出場しました。
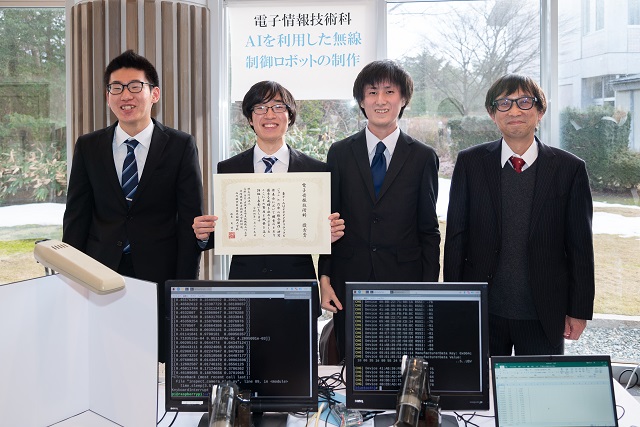
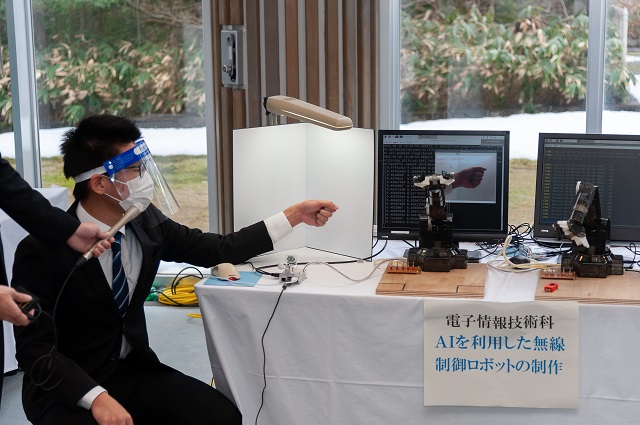
AIを利用した無線制御ロボットの制作電子情報技術科優秀賞学生数3人
最近、身の回りにAI利用を謳っているサービスや機器が非常に多くなっています。現在使われているAIがどのような技術なのか、自分たちで理解し、そのAIを使用してロボットを制御することに取り組みました。ロボットアームを制御するシステムについて、ラジコンのようなプロポを使うのではなく、自分の腕をコントローラとして、腕を動かすことでロボットアームを制御するものを考えました。