
(2024年3月26日)
令和5年度九州職業能力開発大学校修了式が、令和6年3月14日(木)に北九州国際会議場において挙行されました。当日は暖かな春の陽気を感じる中、専門課程4科96名、応用課程4科91名の計187名の学生が、晴れて修了を迎えることができました。
式典では修了証書が各科の代表者に授与され、その後、技能照査合格証書が専門課程及び応用課程の代表者に授与されました。また、対外活動で優秀な成績を収めた学生に対して行う学生表彰について、今年度は4件の表彰を執り行いました。
続いて、校長告示が行われ、「急速に進歩する技術のなか、技術者として生きる皆さんは、技術に磨きをかけ、広い視野を持ち、積極的にチャレンジしてほしい。」と激励の言葉を述べられました。
修了生の答辞では、専門課程と応用課程の代表者がそれぞれ、学生生活の思い出や新たな道へ進む決意、そして、家族や仲間、恩師への感謝の言葉を述べ、これからの活躍を誓いました。
修了生の皆さま、ご修了おめでとうございます。新たな旅立ちを迎える皆さんの一層のご活躍を心よりお祈りいたします。

修了証書授与

修了生答辞

袴姿で修了式へ

修了生全員で記念撮影
(2024年3月26日)
3月7日(木)に、生産機械システム技術科1年生の標準課題(生産機械コース)の動作審査会(競技会)と発表会が開催されました。
製作したロボットは、リンク機構を利用した3本の移動脚と固定脚を交互にXY方向にスライドさせ、縦・横・斜めの全方向に歩行できます。このロボットを1グループ4~5人、5ヶ月で製作します。これまで習得してきた設計、加工から制御までの知識、技術を活かすと共に、グループで協力して課題に取り組みました。
動作審査会は、2本のポールをロボットが8の字で歩き、制限時間30分以内もしくはバッテリー切れまでに何分動くか、何周できるかを競います。途中ポールに当たると減点となり、再スタートします。今年1番長く動いたロボットは30分間で、4周稼働できました。
発表会は、各グループ10分の発表と4分の質疑応答を行いました。グループでの事前準備や発表者の練習の成果もあり、プレゼンテーション資料、発表内容ともにわかりやすかったです。4月からは1年かけて開発課題に取り組みますが、ぜひ今回の経験を活かしてもらいたいと思います。

全方向移動型ロボット

動作審査会の様子


発表会の様子
(2024年3月26日)
これからのものづくりに対応していくためには、生産現場の知恵と新しい技術を結び付け、それを活かすことができる人材が求められています。
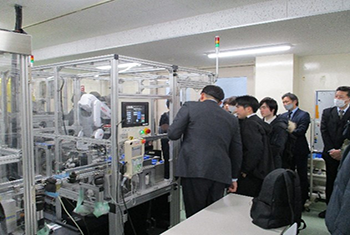
当校の生産システム系開発課題は、その生産・製造現場のリーダーを目指した教育訓練の集大成として、4年生で実施します。テーマごとに生産機械システム技術科、生産電気システム技術科、生産電子情報システム技術科の学生が数名ずつ参加し、プロジェクトとして開発を行います。
異なる専門分野の科の学生が集まる開発課題のプロジェクトは、学生にとって初めての経験であり、チームワークやコミュニケーションの重要性を認識しながら、企画、設計、試作、製作、評価というプロセス経験します。これらは、一般大学校でほとんど経験できない貴重なものです。
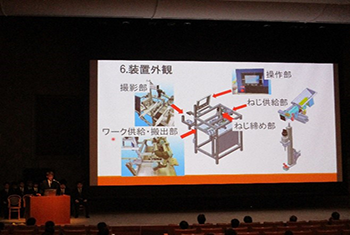
昨年の4月からおよそ1年かけたプロジェクトが終了し、2月29日(木)北九州国際会議場メインホールにおいて、各テーマの代表者による製作発表がおこなわれました。

北九州国際会議場メインホール

ピースピッキング試作装置の開発

圃場作業用ロボットの開発
自動ねじ締めシステムの開発

海洋ごみ運搬ロボットの開発

海中作業用ロボットの開発

農業支援用ロボットの開発
(2024年3月26日)
12月21日(木)に生産機械システム技術科1年生の標準課題(生産機械コース)の中間発表会および標準課題(ロボットコースG課題)の発表会と動作審査会が行われました。
標準課題は4~5名を1グループとし、グループ全員が生産現場を意識した課題製作に取り組む実習です。その過程の中でものづくりに必要となる「テクニカルスキル」や、グループ内での役割分担、ミーティング、製作スケジュールの計画立案、発表会などを通じて「ヒューマンスキル」を養います。
今年度、生産機械コースは「全方向歩行型ロボットの製作」に4グループ、ロボットコースは「ボタン電池組立装置の製作」に1グループが取り組みました。製作した全方向歩行型ロボットは、リンク機構を利用した3本の移動脚と固定脚を交互にXY方向にスライドさせ、縦・横・斜めの全方向に歩行できます。ボタン電池組立装置は産業用ロボットが搬送した基板にボタン電池を挿入する装置で、同じく1軸送りねじ機構によりボタン電池を移動、挿入できます。いずれの装置の製作にも、CAD、部品加工、PLC制御に関する高いスキルが求められます。
生産機械コースの中間発表会は、各グループ10分の発表と4分の質疑応答を行いました。グループでの事前準備や発表者の練習の成果もあり、プレゼンテーション資料、発表内容ともにわかりやすかったです。
また、ロボットコースG課題の「ボタン電池組立装置の製作」は、発表会と併せて動作審査会も行われました。


中間発表会(生産機械コース)の様子

発表会(ロボットコース)の様子
動作審査会(ロボットコース)の様子
(2024年3月6日)
昨年度の小倉の街歩きマップに続き、第2弾となる黒崎の街歩きマップを作製しました。更に今年度はマップとリンクした模型も作製しています。
学生達が8月から約6ヶ月の期間をかけて、黒崎の街と建物についての調査をし、街歩きを通して黒崎の持つ魅力を探してきました。
この街歩きマップは「黒崎の魅力を若者に知ってもらい、訪れたくなるマップ」をコンセプトに作製しており、事前の調査では学生同士でどんな情報があると面白いのか?街を歩きたくなるキッカケは何か?などを議論しながら内容を検討しました。現地調査では、建物の見学や景観調査などを行い、黒崎の魅力を探しました。マップには街歩きの写真と感想をZ世代目線で掲載しているので、実感のこもったマップになっていると思います。
街歩きマップのデータを九州職業能力開発大学校のHP上で公開しているので、ぜひダウンロードして活用してみてください!
Z世代の建築学生が作った くろさきマップ_compressed.pdf

△街歩きで撮影した黒崎の風景
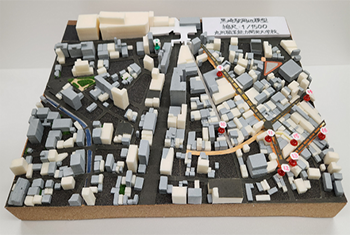
△黒崎の模型
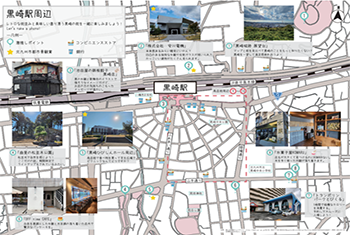
△街歩きマップ(地図面)

△街歩きマップ(裏面) △街歩きマップ(表紙)




![]()