
(2023年3月30日)
前回お届けした生産電気システム技術科3年生の標準課題Ⅰ(パワーコンディショナ設計・製作)に引き続き標準課題Ⅱ(電動車両走行システム設計製作課題実習)の取り組みについてお届けします。この実習も約3カ月掛けて取り組む課題です。10単位(90時間)掛けて、1グループ4~5名の学生で設計、製作していきます。電動車両とは写真1に示すレーシングカートに自分たちで作ったモータや回路を載せて走る車両です。モータはマイコンで動かします。C言語というプログラム言語を使ってプログラムします。各グループは最高速度が1番だとか、トルクが1番大きいとか、登坂能力が1番など、コンセプトを決めて製作に当たります。標準課題Ⅰと同様に、これまで習ったたくさんの技術が必要となります。勉強してないと大変です。アナログ・デジタル電子回路技術、パワーエレクトロニクス技術、マイコン制御技術、実装技術等、多くの知識を必要とします。と言っても1年生からまじめにお勉強していれば大丈夫です。当校は普通高校からの入校生が多く、上記の技能・技術は入ってから学んでいくので安心して下さい。
最初にカートに搭載するモータ(DCブラシレスモータ)のコアにコイル(絶縁された銅線)を巻いて製作します(写真2,3)。続いて製作したモータの試験をして、所望のトルクや出力になっているかを試験します(写真4)。並行して基板やプログラムの作成作業を進め、写真5のように組立・配線作業を行い、完成です(写真6)。最後に、完成したカートで走行会を実施しました(写真7,8)。無事に走れてみんな大喜びでした。

写真1 電動車両(レーシングカート)

写真2 DCブラシレスモータの製作1
コアにコイルを巻いていく
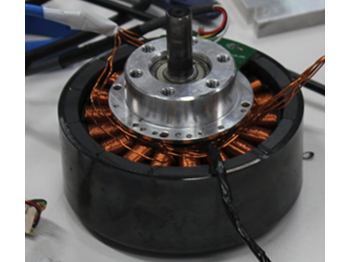
写真3 DCブラシレスモータの製作2
モータの完成
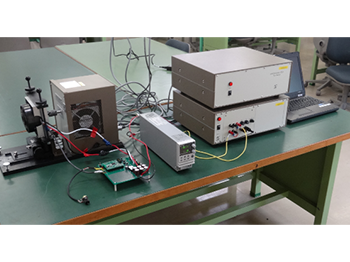
写真4 DCブラシレスモータの試験
モータのトルクや出力を測定

写真5 組立・配線作業
モータや回路を取付け配線

写真6 完成
さあ、いよいよ走行だ!

写真7 走行会の様子1
位置について

写真8 走行会の様子2
どっちが勝った?
(2023年3月30日)
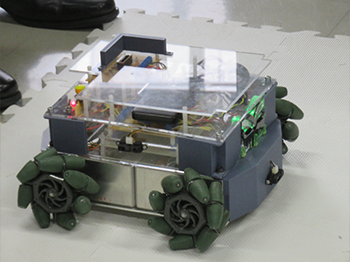
3月9日(木)~10日(金)に、生産電子情報システム技術科3年生(応用課程1年生)の標準課題Ⅱ(全方向移動型ロボットの開発)の 最終発表会と展示会が開催されました。
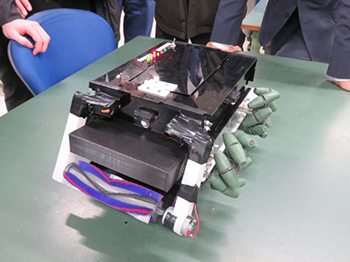
具体的な内容としては、全方向移動が可能なメカナムホイールを用いた移動ロボットおよび無線通信機器を用いてロボット制御を行う、全方向移動システムの設計・製作を行う課題実習です。学生たちは、これまで学んだ電子回路設計、コンピュータシステム技術、通信技術を活用し、事前に与えられた基本仕様と自ら考えたオリジナルな仕様を併せて、ユニークなロボット開発を行いました。
今回は客員教授の先生、生産電子情報システム技術科の先生たちも見学・参加をしたことで、発表会として大いに盛り上りました。
各グループ10分の発表と質疑応答5分を行い、その後、各教室にて、今回開発したロボットについて展示発表・動作評価を行いました。各プロジェクトメンバー(学生たち)一人一人が開発・製作したものの動作や特徴を精一杯アピールすることができたのではないでしょうか。
来年度からは4年生となり、開発課題という新たな開発に取り組むこととなりますが、ぜひ今回の経験を活かしてもらいたいと思います。



発表の様子
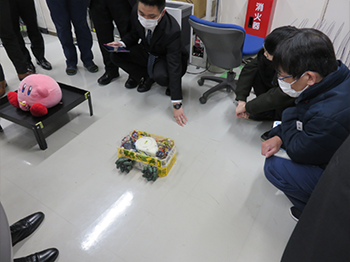




展示の様子
(2023年3月27日)
総合制作実習で6名の学生が、小倉の街歩きマップを作成しました。
10月から約4ヶ月の期間をかけて、小倉の街と建物についての調査をし、街歩きを通して小倉の持つ魅力を探してきました。
この街歩きマップは「小倉の魅力を発見、体験することで小倉に何度も訪れたくなる」をコンセプトに作成しており、事前の調査では学生同士でどんな情報があると面白いのか?街を歩きたくなるキッカケは何か?などを議論しながら内容を検討しました。現地調査では、建物の見学や景観調査、食べ歩きなど、たくさんの体験をしました。マップには街歩きの写真と感想を多く掲載しているので、実感のこもったマップになっていると思います。
街歩きマップのデータを九州職業能力開発大学校のHP上で公開しているので、ぜひダウンロードして活用してみてください!
また、ローカルのリアルを伝えるメディア「real local/リアルローカル」にて、街歩きマップを作成した学生達の思いを綴ったインタビュー記事が掲載されているので、ぜひ読んでみてください!!
「real local/リアルローカル」https://www.reallocal.jp/104964

△街歩きで撮影した写真(紫川)

△街歩きで撮影した写真(小倉城庭園)
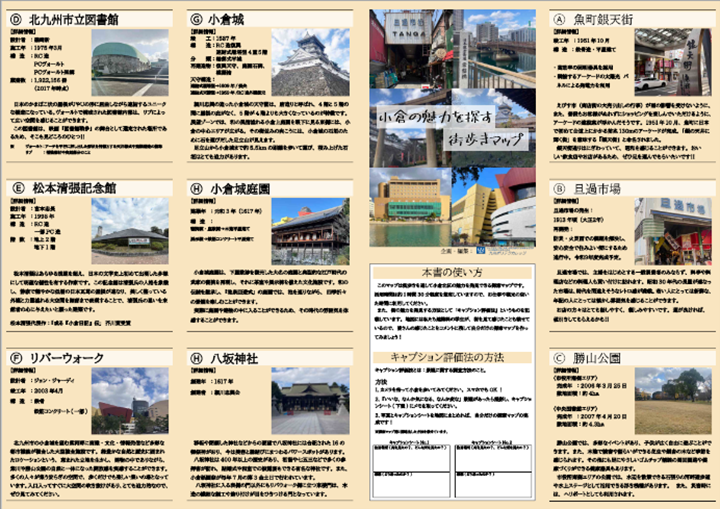
△探索マップ(表面)
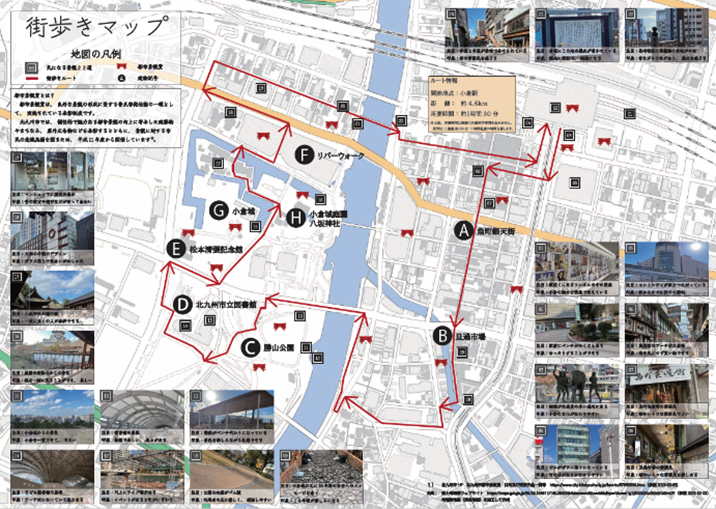
△探索マップ(裏面)




![]()