
(2019年12月20日)
応用課程1年の標準課題では、決められたテーマをグループ毎に製作します。生産機械システム技術科では、「 XY テーブル装置」を製作。これは製造現場で実際に使用されている装置の基本を習得するもので、 X 軸(横)と Y 軸(縦)の動きを一つの装置で実現します。機械加工手順書の作成、機械部品加工、電気配線の接続、制御プログラムの作成まで一連の流れを学びます。
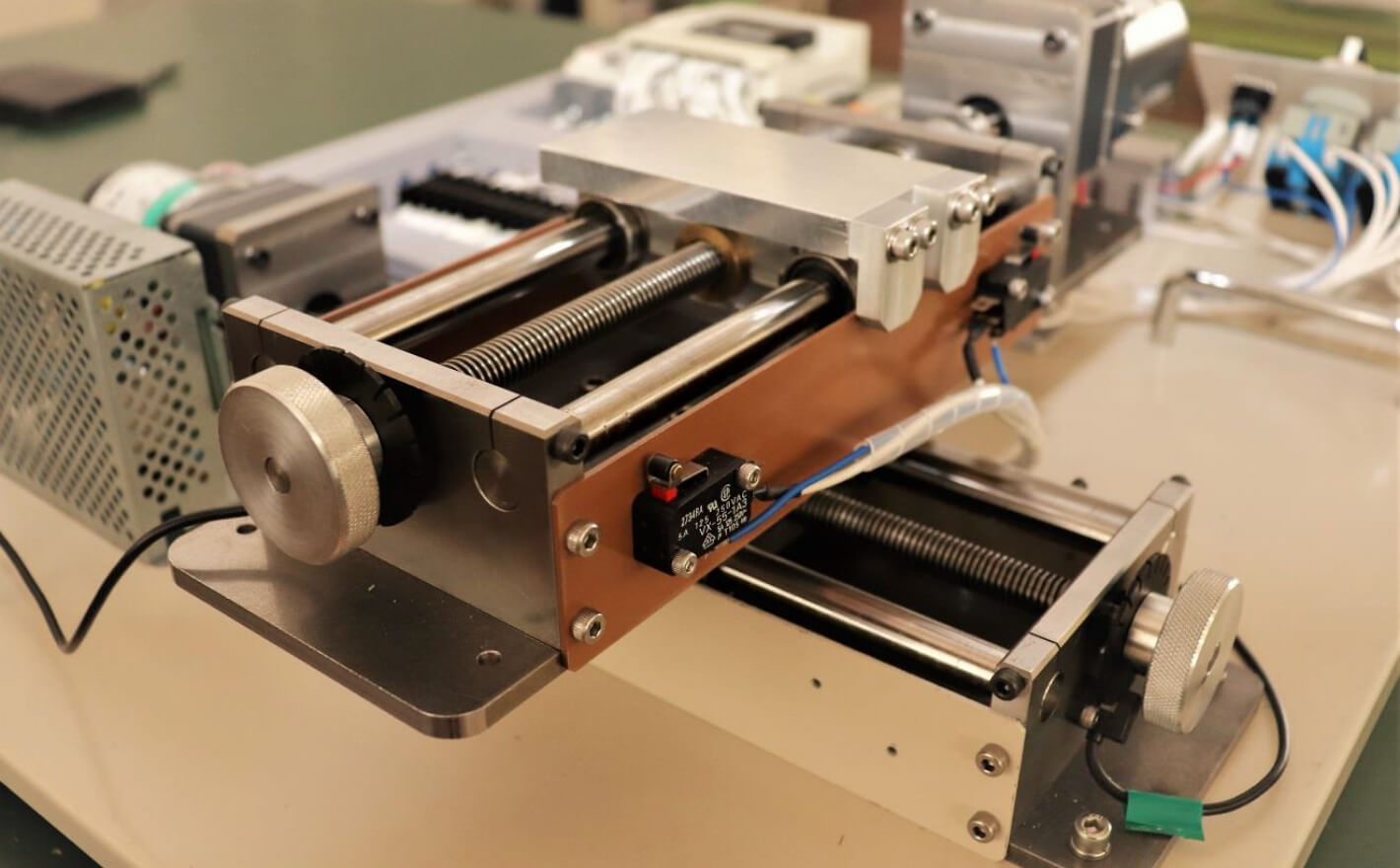
XYテーブル装置
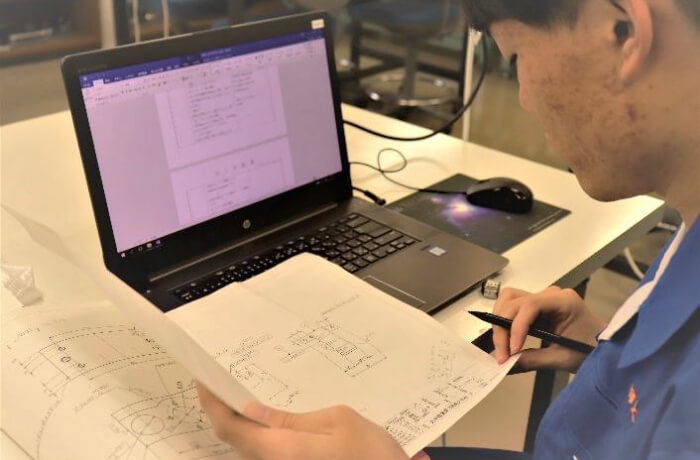
テーマの図面より機械加工手順書を作成します。

作成された機械加工手順書を確認しています。


機械加工手順書によりNCフライス盤で機械部品を作成します。
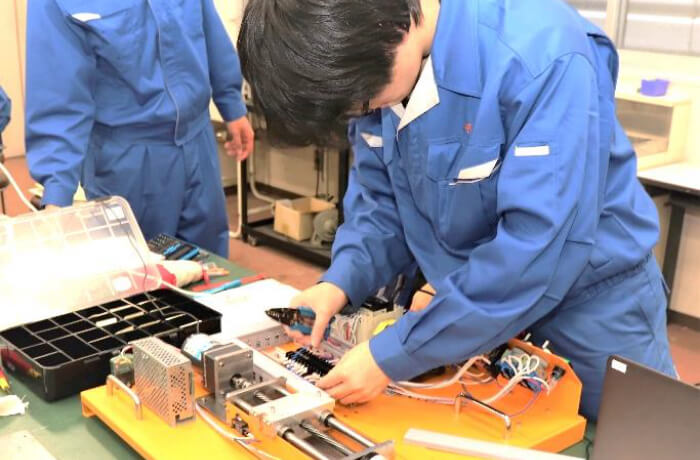
電気配線の接続
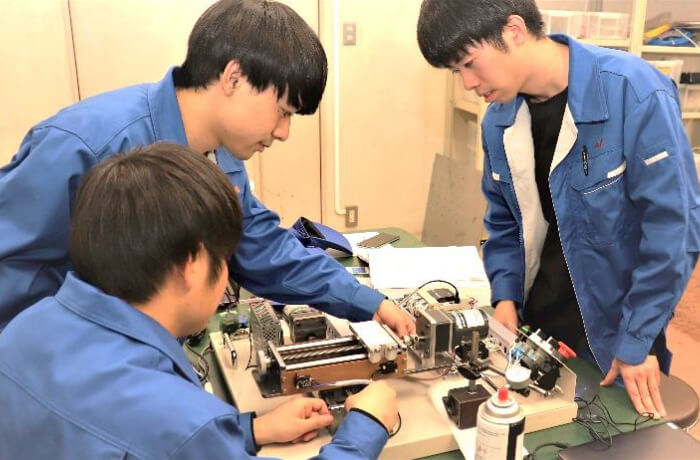
組立て後の調整
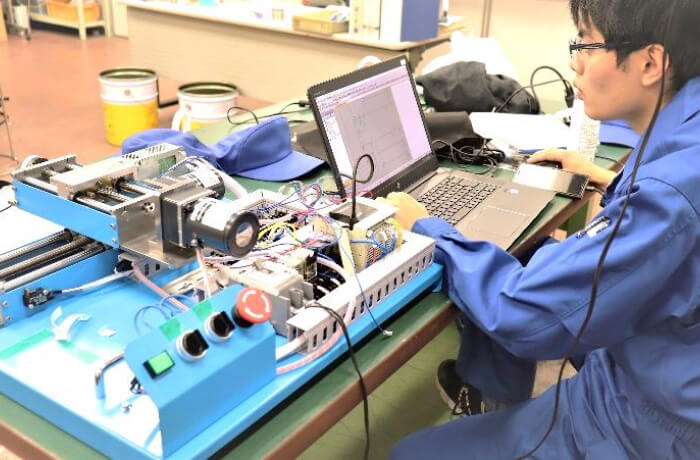
シーケンス制御の確認と修正中

先生による確認
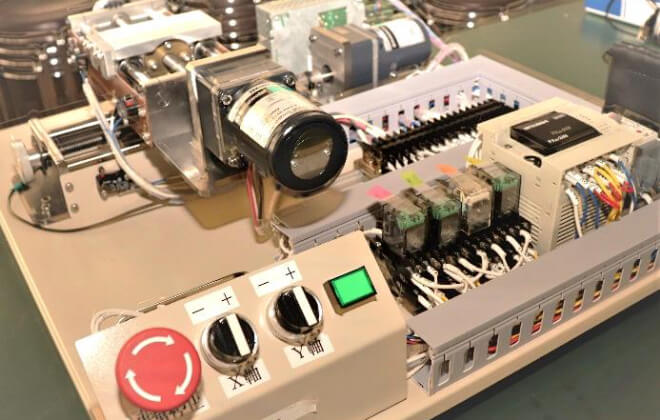
完成したXYテーブル装置
XYテーブル装置の動き
*令和元年度標準課題発表会


12月12日(木)に精密機器製作課題(XYテーブル装置の製作)発表会がありました。各グループ、予稿集を作成。課題の目的、製作内容、製作課程を振り返り、製作したXYテーブルの評価、グループワークの評価、今後の課題などをまとめ、パワーポイントにより発表します。これは、「考えること」「まとめること」「伝えること」という企業で必要とされるスキルを身につけるための機会ともなります。スーツを着ているのは、緊張感を持つためです。
(2019年12月18日)
2021年度就職予定の学生(専門課程1年生、応用課程1年生)に向けて、業界研究セミナーが行われました。
これは各分野の企業担当者より、その分野の具体的な仕事内容や、業界の現状、今後の展望などを教えていただき、学生が進路を決める上で各々方向性を見出すためのものです。今回は、機械系、電気系、電子情報系、居住系に 14企業の担当者にお越し頂きました。

電子情報系の業界セミナーの様子
お越し頂いた企業の分野
・機械系の分野
1.プラントエンジニアリング 2.産業機械関連 3.機械設計
・電気系の分野
1.産業機械関連 2.プラントエンジニアリング 3.電気設備関連
・電子情報の分野
1.情報通信関連 2.半導体・電子部品関連 3.セキュリティ関連
・居住系の分野
1.検査・診断 2.工務店・ハウスメーカー(設計および施工) 3.設備(設計・施工)
4.建築保全・改修 5.ゼネコン
(2019年12月6日)
電気エネルギー制御科および生産電気システム技術科の学生は、12月8日(日)に実施されます電気工事士技能試験に向けて練習を行っております。
主に、学科試験に合格した電気エネルギー制御科1年生が第二種電気工事士試験に挑んでおり、2年生以降の学生は、第一種電気工事試験に挑戦をしております。1年生にとっては入校して初めての国家試験挑戦になる学生もおり、合格するために日々練習に励んでおります。
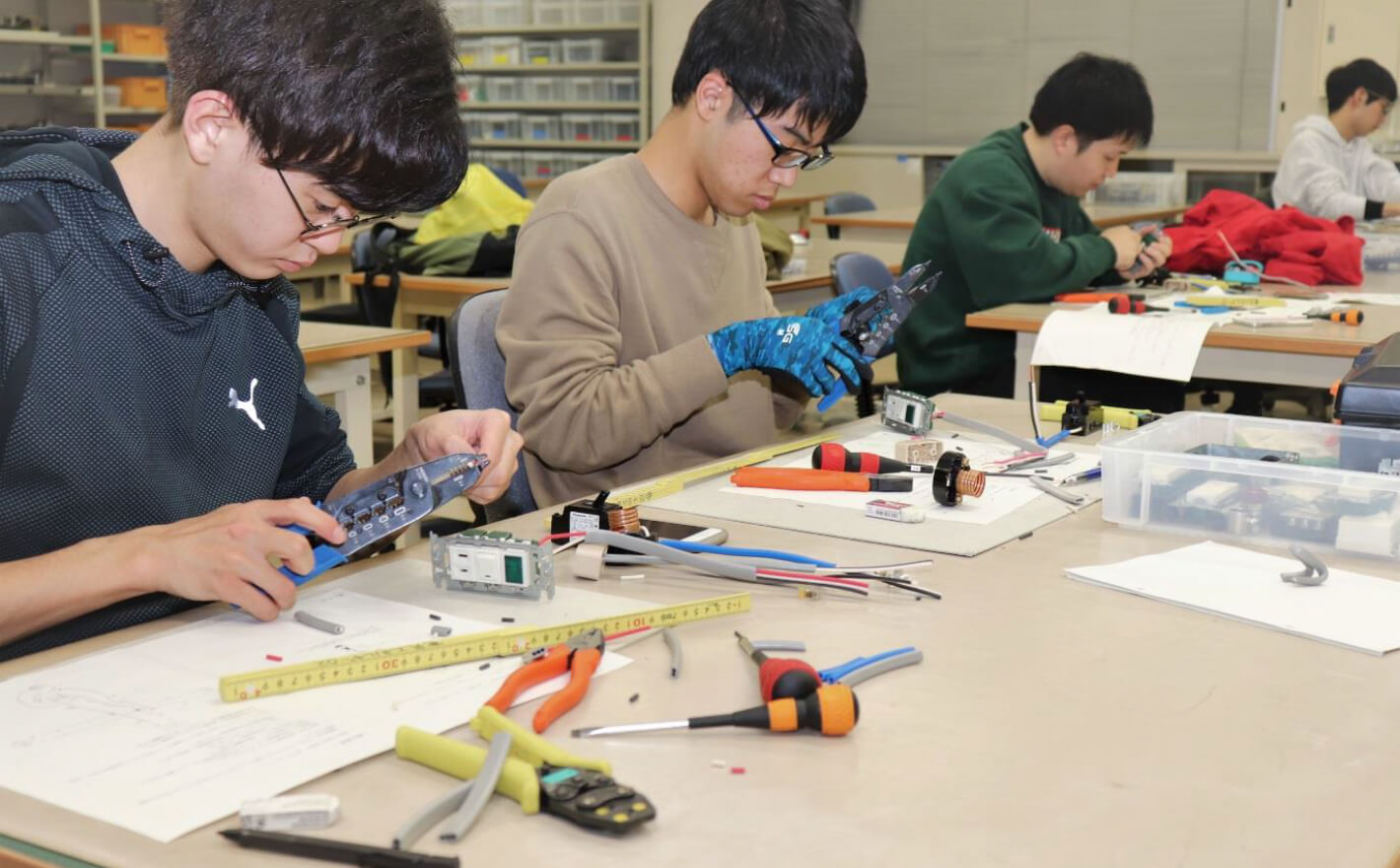
練習は、過去に実施されました電気工事士技能試験の試験問題(一般財団法人電気技術者試験センターにて公開されております)を使用します。
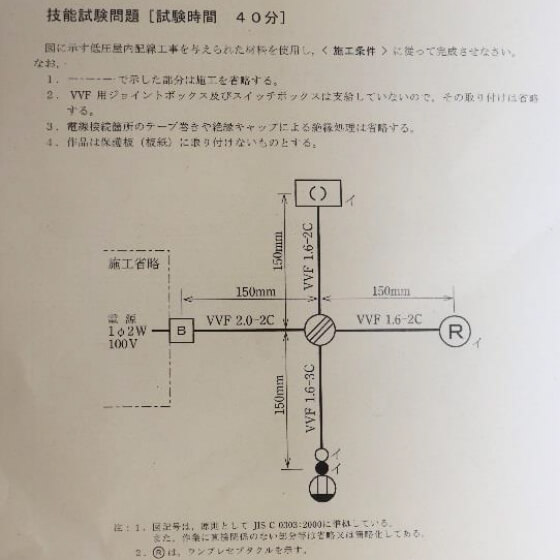
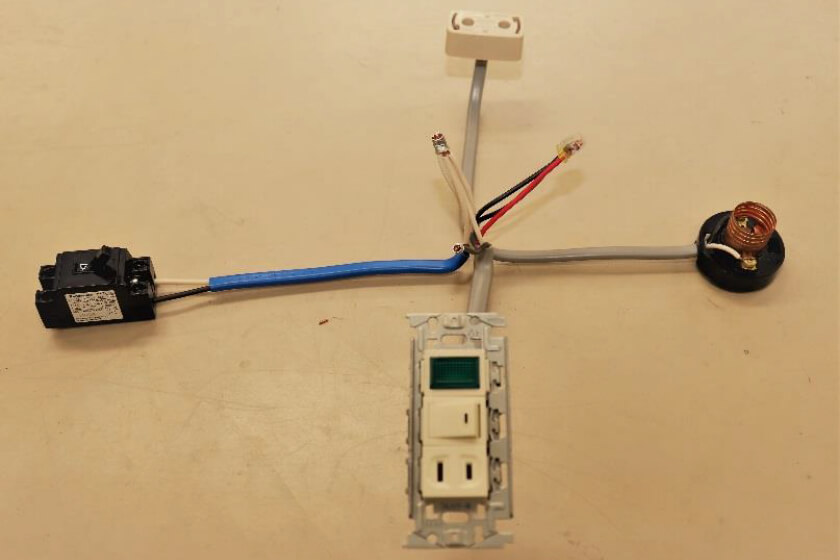
課題の一例(上左)です。まずは、試験時間内に作業を完了する必要がありますが、電気工事では不具合がありますと、不具合箇所からの災害が発生する恐れがありますので、欠陥項目がなく作業をすることが求められます。
学生の作品例(上右の写真)です。試験に向けての練習を始めた頃は、60分程度かかっていた課題を、現在では25分程度で完成できるようになっています。

電気工事士試験に合格するためには、時間内にミスなく作成できることに加えて、ミスがあるかないかを試験当日、自分で判断できることも重要になります。そのため完成した課題は、指導員先生と一緒に点検項目を確認します。
電気工事士試験の問題の中には、学生にとって一見難しい課題もありますが、指導員先生からきめ細やかい助言を受けながら試験当日まで練習に取り組んでいます。受験者全員が合格できるといいですね。
(2019年12月4日)
技能五輪は、青年技能者(23歳以下)の技能レベル日本一を競う競技大会で、毎年11月に開催されています。今年は、愛知県で開催され、46職種が競われました。
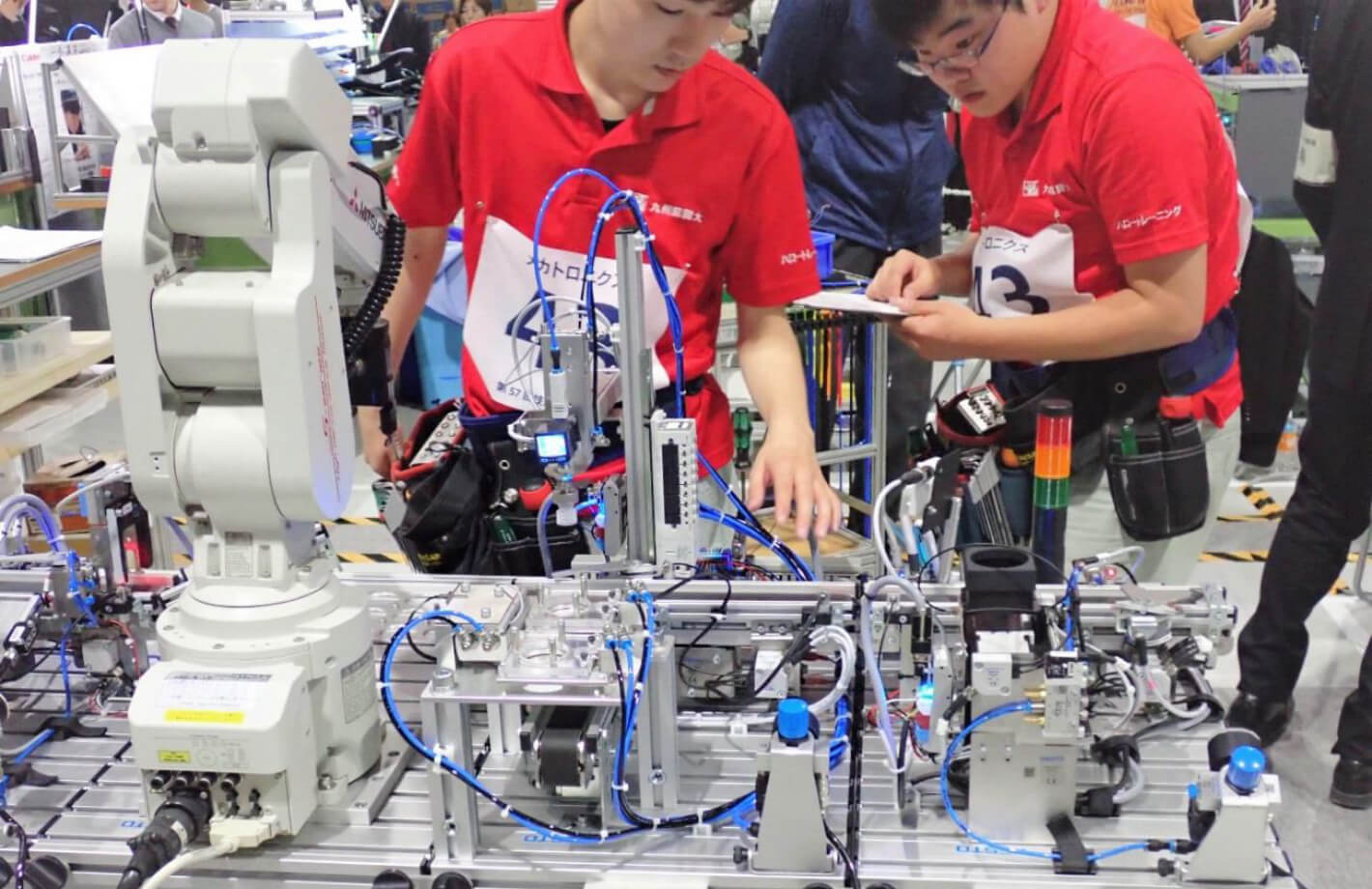
そのうちメカトロニクス職種に当校から2名(電気エネルギー制御科2年)が参加。総競技時間7時間の二つの課題に挑みました。メカトロニクス職種は、工場の自動生産システムの製造、保守を模した競技です。

競技ルールなど説明。全国から
44チーム(企業41チーム、学生3チーム)が参加。

参加者紹介(当校学生)。

大会前の動作確認。
機械装置、電気回路、
空気圧回路などの製作、調整を行います。
競技内容
第1課題ステーション製作(競技時間:5時間)
支給された部品と図面をもとに、模擬生産設備の一部のステーションの機械装置、電気回路、および空気圧回路の製作と調整を行う。さらに、そのステーションを他のステーションや産業用ロボットと組み合わせた生産設備を構築し、仕様書通りワークが搬送されるように動作プログラムを作成する(大会 競技課題より)。
第2課題メンテナンス(競技時間:2時間)
第1課題で構築した生産設備について、設備を改善するための保全作業を行う。仕様書通りの校正や動作となるように、設備を改善する(大会競技課題より)。

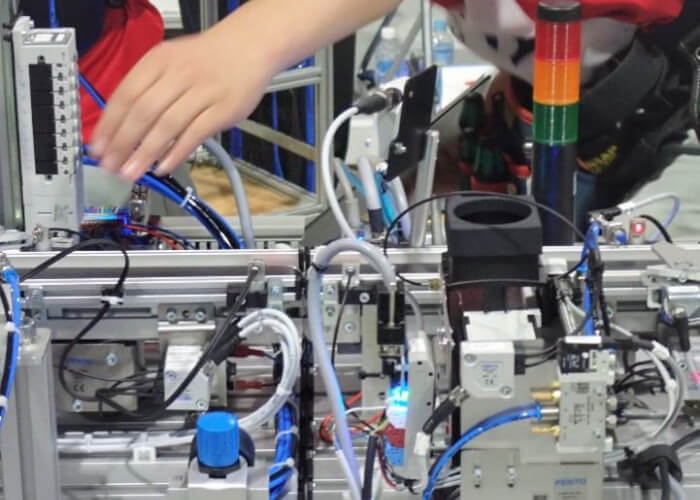
競技の様子
競技開始時は、張り詰めた会場の雰囲気に圧倒されていたようですが、徐々に集中していました。結果は振るいませんでしたが、企業チームの真剣さやその姿勢などに触れ、貴重な経験になったようです。この学生のうち一人は、メカトロニクスの選手として来年、大手企業に就職予定です。
(2019年12月2日)
11月9日(土)、10日(日)海洋ロボットの競技会が沖縄県にある宜野湾新漁港で開催され、AUV部門6チーム、ROV部門6チームが出場しました。
当校は、AUV部門に2チーム出場しましたが、潜航中にトラブルが続き、それぞれ予選3位と4位のまま、残念ながら決勝進出は叶いませんでした。
AUV(Autonomous Underwater Vehicle): 自律型無人潜水機
ROV(RemotelyOperated Vehicle) : 遠隔操作型無人潜水機会
*大会の様子

大会の様子。ダイバーのサポートにより進水します。沖縄宜野湾新漁港にて

AUV「カジキング」の様子をインタビュー

AUV「orca」の様子をインタビュー

ダイバーとの打合せ

競技スタート
*準備、プレゼンテーションの様子

当校のある北九州市より飛行機で運び、現地で組立中
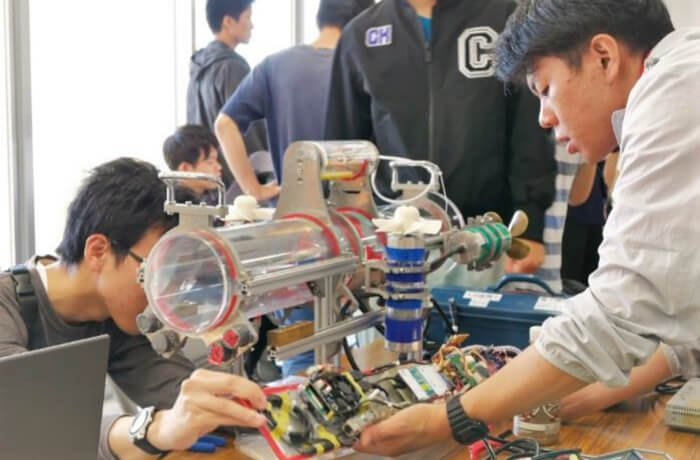
各部の接続を最終確認

電子回路を防水筐体へ収めます。

プレゼンテーションの様子

開発メンバー(機械系、電気系、電子系)とAUV「orcareiwa」(左)「カジキング」(右)
今回、方位センサとの通信不良、方位センサの狂い、折り返し地点のGPS座標設定ミス、ウキを牽引するロープがプロペラに絡まるアクシデントなどがあり、課題が浮き彫りになりました。これから来年2月まで、競技課題を達成できるように調整を続けます。

参加者集合写真
「orca 予選1」
「orca 予選2」
「カジキング 予選1」
「カジキング 予選2」




![]()