
(2019年10月28日)
2021年修了予定の190名ほどの学生に対して、各科(専門課程4科、応用課程4科)毎に、就職ガイダンスが行われています。科別に8回行い、各科それぞれに必要とされる就職情報などを詳しく提供しています。

この日は、生産機械システム技術科(応用課程)1年生が、当校就職支援アドバイザーより、「就職市場の動向」「昨年度の当校の就職実績」「これから就職活動の流れ」など説明を受けていました。
(2019年10月25日)
専門課程2年では、1年生から学んだ知識や技術を実際に活かす総合製作実習があります。さらに、これは数名のグループで一つの課題に取り組むもので、チームワークを学ぶ機会ともなります。
このグループでは、「木製建具を用いた耐震補強」の実験を行っています。和室で用いられる「襖(ふすま)」や「障子(しょうじ)」の引き違いの一部を固定して、「耐震壁」としての効果を検証するものです。これらの建具などは、学生が実際に製作したものです。

製作した建具と実験前の様子

実験後の様子


破壊後の検証作業
(2019年10月21日)
当校は、授業時間が一般大学校の1.9倍で、そのほとんどが座学と実習です。その中で、わずかですが体育の授業があります。




この日は、生産技術科1年生32名が、バスケットの試合を楽しんでいました。
(2019年10月16日)
専門課程2年では、1年生から学んだ知識や技術を実際に活かす総合製作実習があります。さらに、これは数名のグループで一つの課題に取り組むもので、チームワークを学ぶ機会ともなります。
このグループでは、お茶室の設計から製作まで取り組んでいます。実際にお茶席が設けられることを目指し、11月の学園祭までに完成予定です。
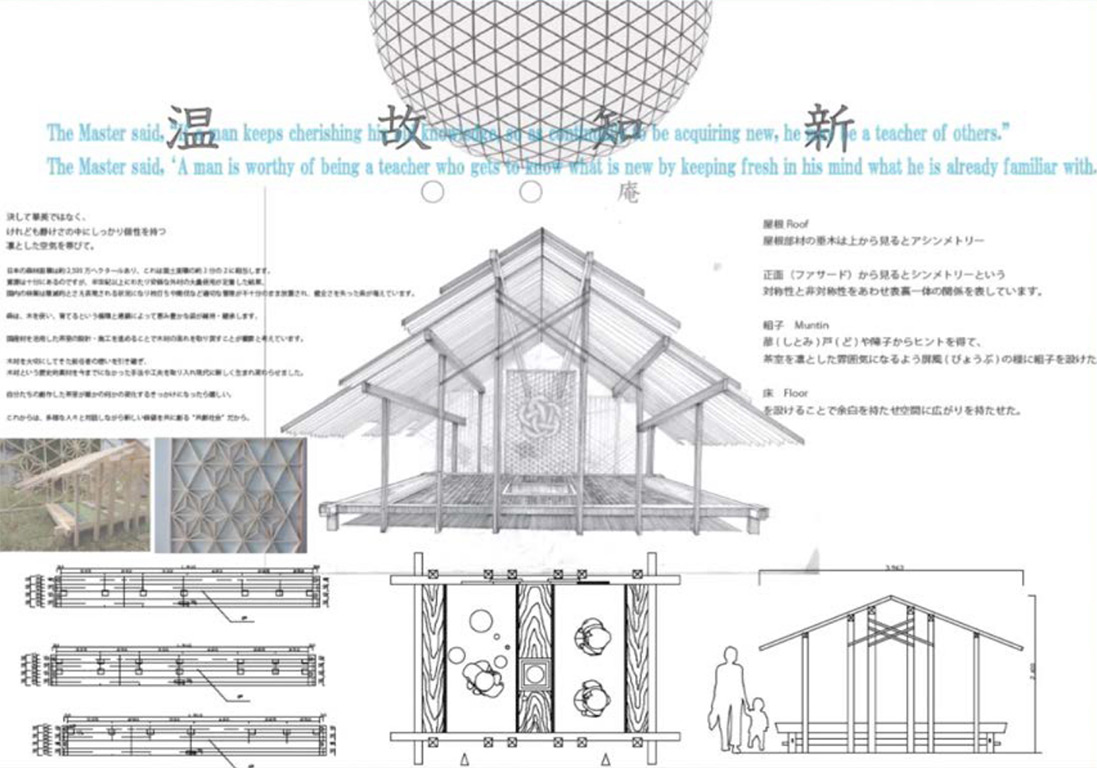
学生たちが考案した「茶室」の完成予想図。テーマは「温故知新」




現在、「仮組み」まで進んでいます。伝統的な木組みの工法を用いており、3畳の広さがあります。
この仮組み後、各部を調整して本組みまで進みます。


要所で先生の指導のもと製作を進めます。



建築の技術とともにチームワークを身につける機会となります。
(2019年10月10日)
10月7日(金)応用課程2年生(大学校4年相当)が、今年4月より取り組んでいる開発課題(修了研究)の中間発表会が行われました。開発課題は、生産システム系(機械、電気、電子情報)が3科合同でグループワークを中心に、与えられたテーマに沿ってロボットやシステムなどの開発します(居住系は1科で数チームのグループを作り取り組みます)。
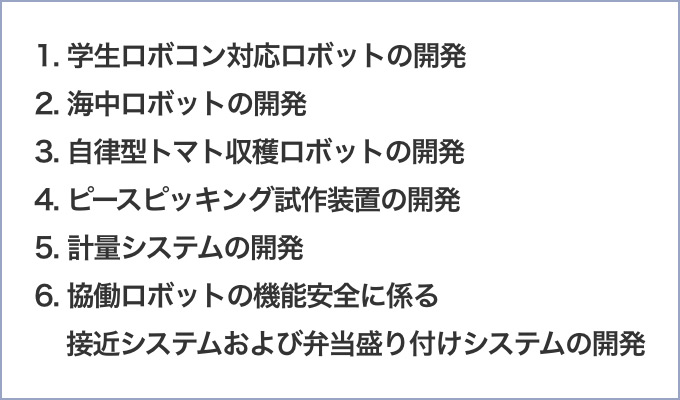
開発課題6つのテーマ
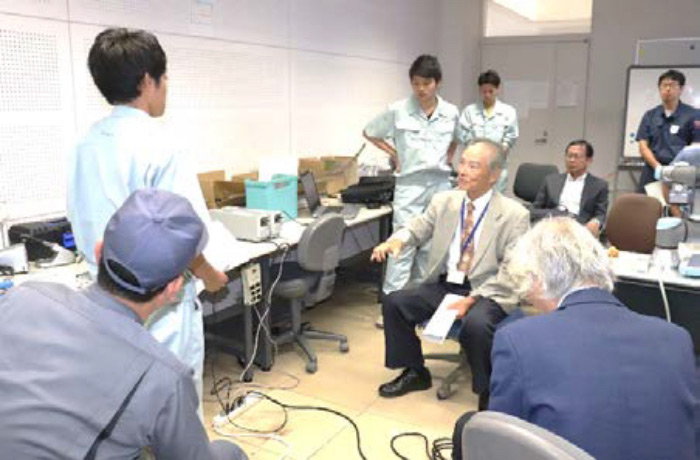
発表の様子
発表は、3名の客員教授、校長、副校長、能力開発統括部長、各科の担当先生に対して行われます。開発担当者は4月からの進捗状況や課題、今後のスケジュールなどを説明し、アドバイスなどを受けます。
1.学生ロボコン対応ロボットの開発
2020年5月31日(日)に東京で開催されるNHK学生ロボコンに向けて開発を進めています。競技名は「ROBORUGBY」。今回も2台のロボットの協同作業により、ラグビーボールを「投げ」、「受け取り」、「キックする」高度なロボット技術が要求されています。
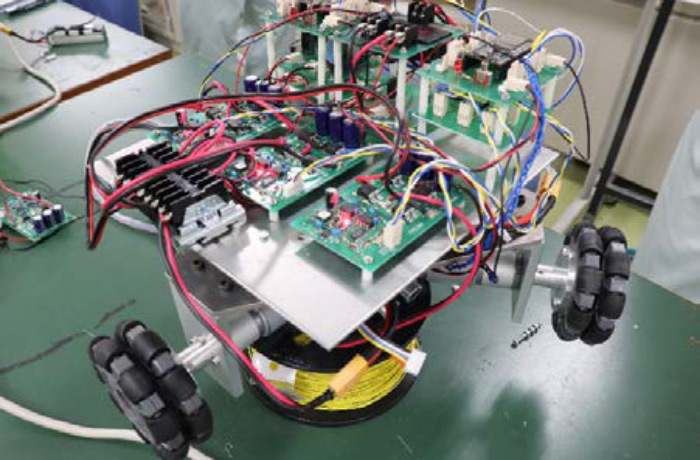


センサーテスト用の試作機などを前に、学生が客員教授、先生に説明し、アドバイスを受けています。
2.海中ロボットの開発
海中ロボットの開発では、3台の機体を製作しています。そして新しい測位システムや測距システムなどの開発に取り組んでいます。今年も技術レベルの向上を計るため、各研究機関などが開催する競技大会に出場予定です。(10月19、20日第7回水中ロボットフェスティバルin北九州2019、11月9、10日、第5回沖縄海洋ロボットコンペティション2019に参加予定)


開発担当者がそれぞれ係わっている技術について説明しています。
3.自律型トマト収穫ロボットの開発
開発しているトマトロボットは、人の手に近い形状の4本指のハンドでトマトを収穫します。そのためトマトを認識する照度センサ、トマトを掴んだことを認識し、傷めないようにする加圧センサなどさまざまな技術が必要とされます。今年も、12月に開催されるトマトロボット競技会の参加を目指し、さらに、響灘菜園での実用化を目指して取り組んでいます。




ハンドは3Dプリンターで製作しています。センサなどの画像認識システムの説明をしています。
4.ピースピッキング試作装置の開発
ピースピッキングとは、物流倉庫において、搬送先別に商品を一個単位で仕分けるピッキング作業です。この課題では、ピッキングを自動化するための装置を開発しています。今年の目標は、ワインボトルなど形状の異なる商品をピッキングできるように、複数のハンドを製作し、ツールチェンジ機能を実装する予定です。
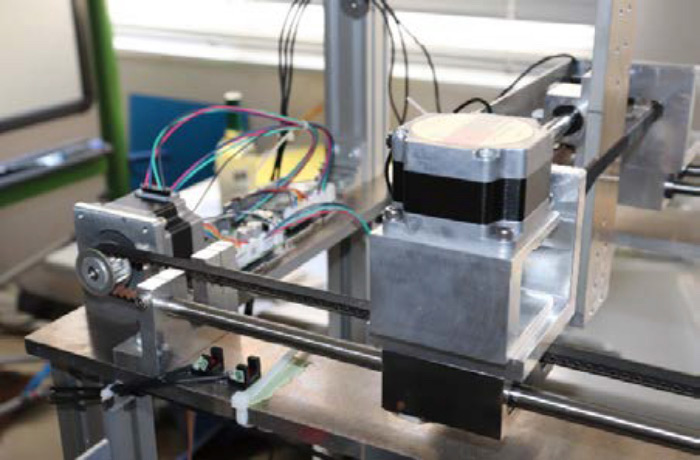

製作中の複数のハンドなどの説明をしています。
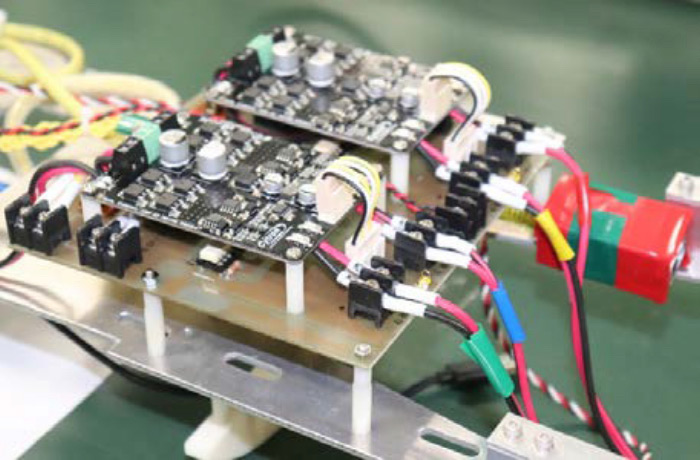
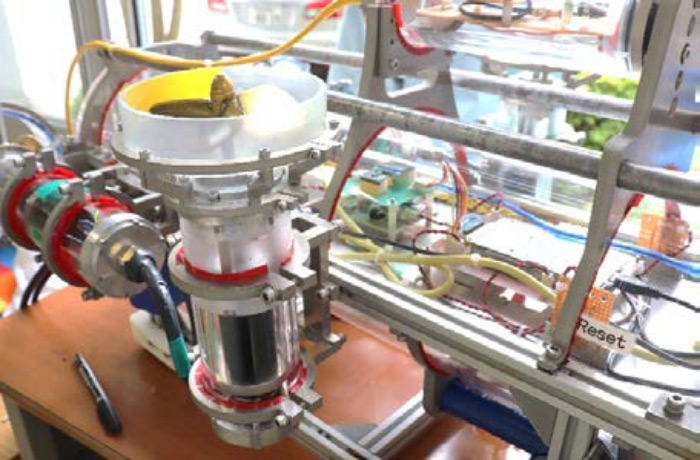
5.計量システムの開発
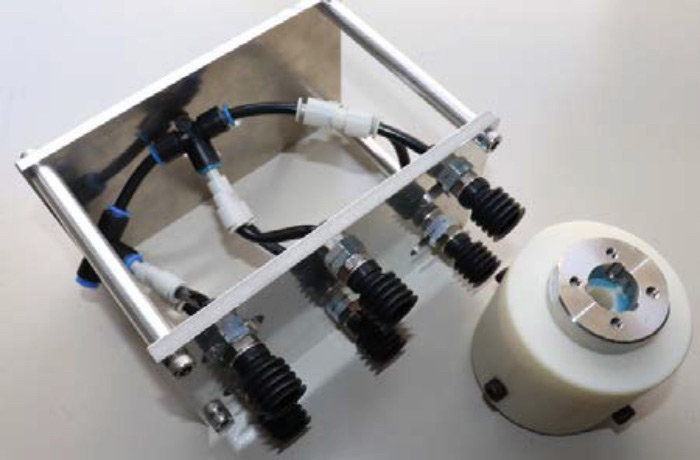
計量システムは、自動化ラインにおいて食品原料を一定量に袋詰めするためのシステムを開発しています。具体的には、低コストの質量計測用基板の製作と安定した質量測定部(ロードセル)の開発を目指しています。



3Dプリンターで製作した送り出し部、試作中の質量測定部と基板。
システムの計測データなどを使用して説明しています。
6.協働ロボットの機能安全に係る接近システムおよび弁当盛り付けシステムの開発
協働ロボットとは、安全柵などを使わず、人が傍らにいても安全に動かせるロボットのことです。この課題では、安全のために人と物とを識別するシステムとそれに加えて、人と協働してお弁当を盛り付ける安全で効率的なシステムの開発を目指しています。



試作中のハンド。協働ロボットの動きに合わせて説明しています。
開発課題では、個人発表(プレゼンテーション)の機会が多くあります。それにより開発担当学生が、自分の開発内容をまとめ、分かり易く伝えるなど企業で働くために必要なスキルを身につける機会となります。




![]()