
(2019年6月19日)
生産技術科1年では、手動の汎用工作機械(旋盤、フライス盤など)を用いて金属加工の技術を習得します。2年になるとそれらに加えて、コンピュータ制御の工作機械について学びます。今回の授業では、数値データのプログラミングからデータファイルの扱い、工作機械の操作方法まで、実際の現場と同じ条件の中で一連の作業工程を習得します。
*教室において
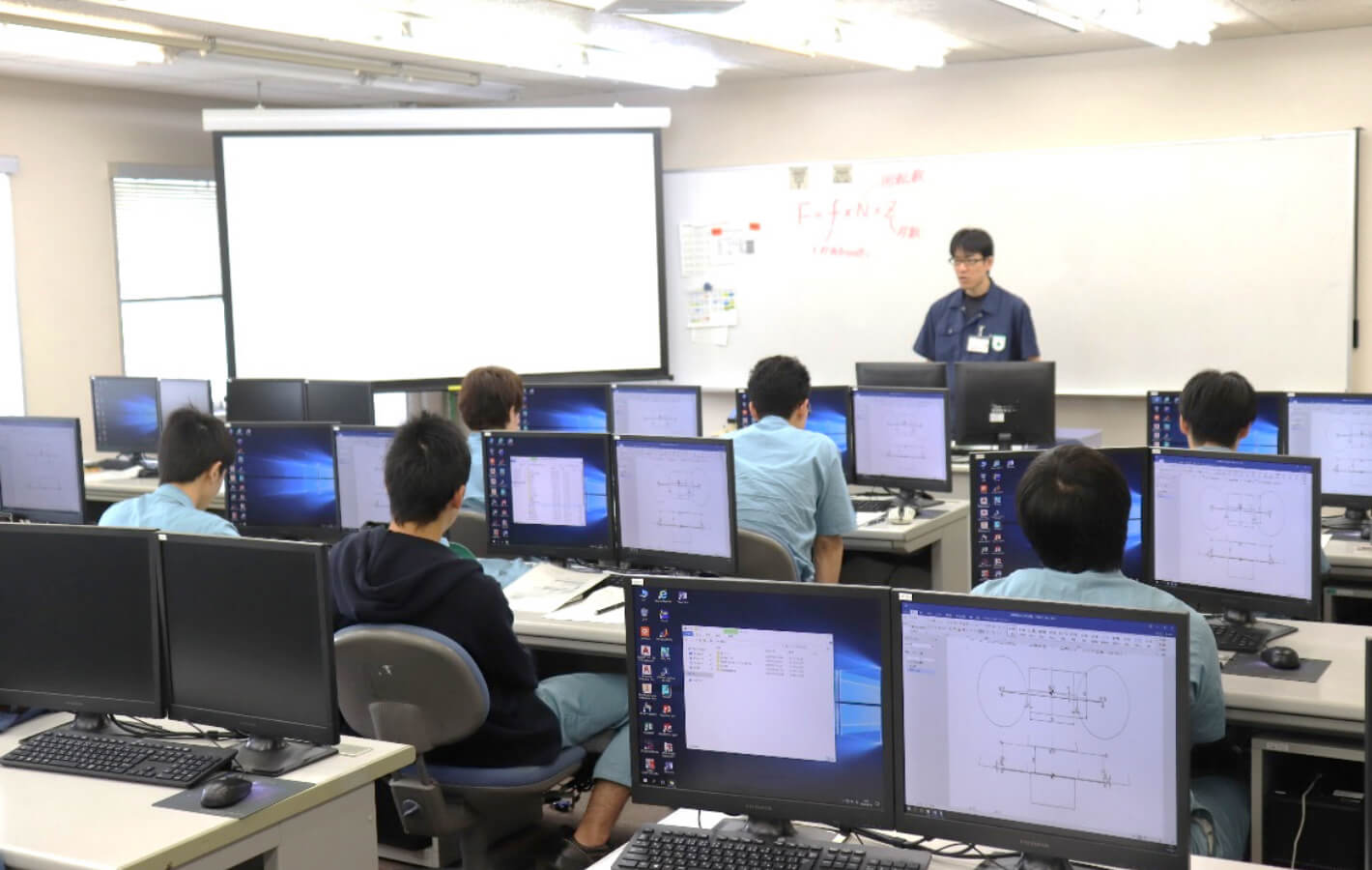
プログラミングの授業
学生は各自2台のモニターを使用します。
右側のモニターは先生と共有になっていて、資料などの説明にも使われます。
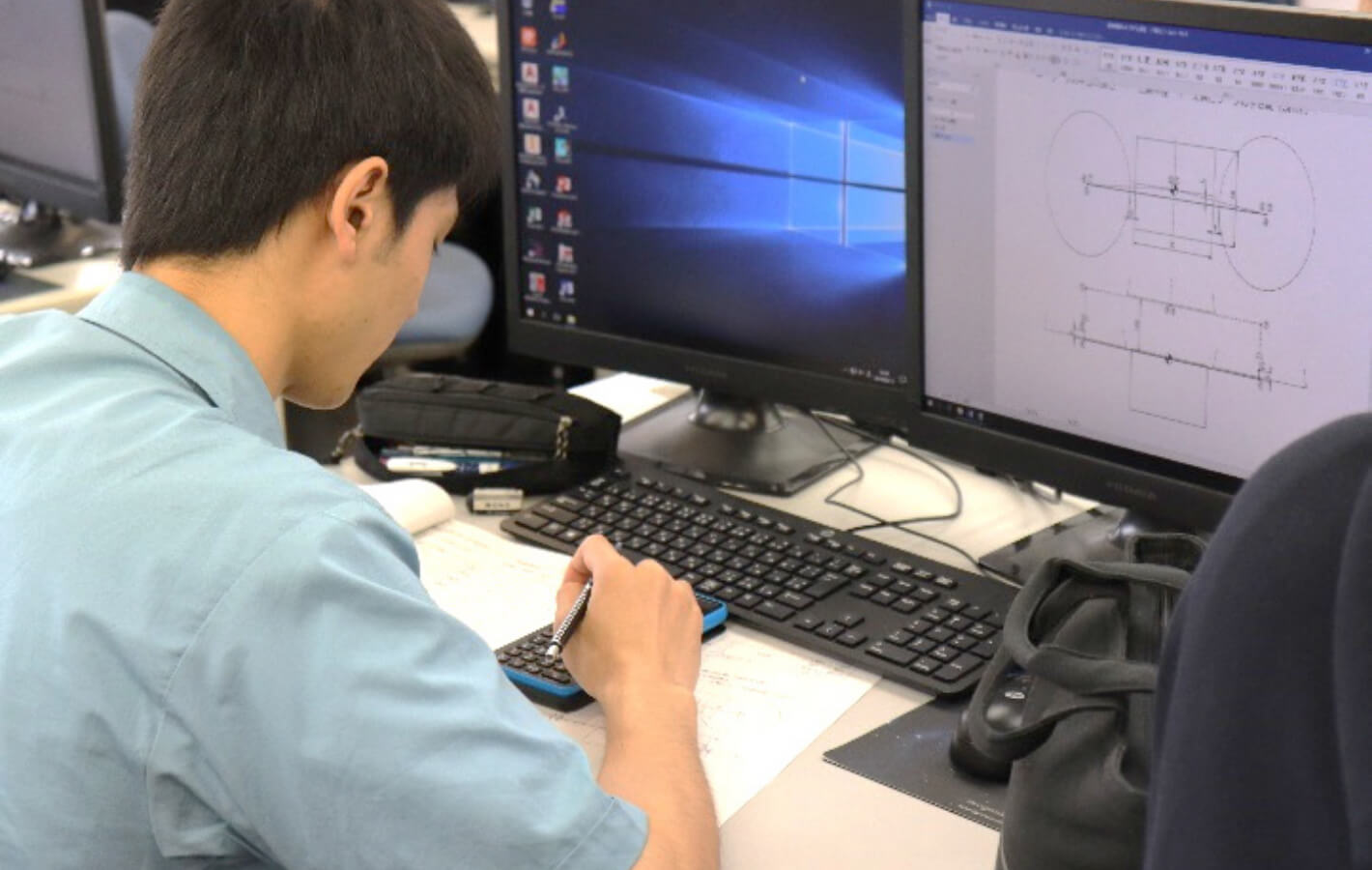
関数電卓による数値の計算

NCtrace V.5ソフトによるプログラミング
授業の様子
学生同士相談しながら学んでいます。
*実習場にて

マシニングセンタ
今回は、右側のパネル操作について学びます

教室で作成したプログラムをマシニングセンタで読み込めるように設定します。
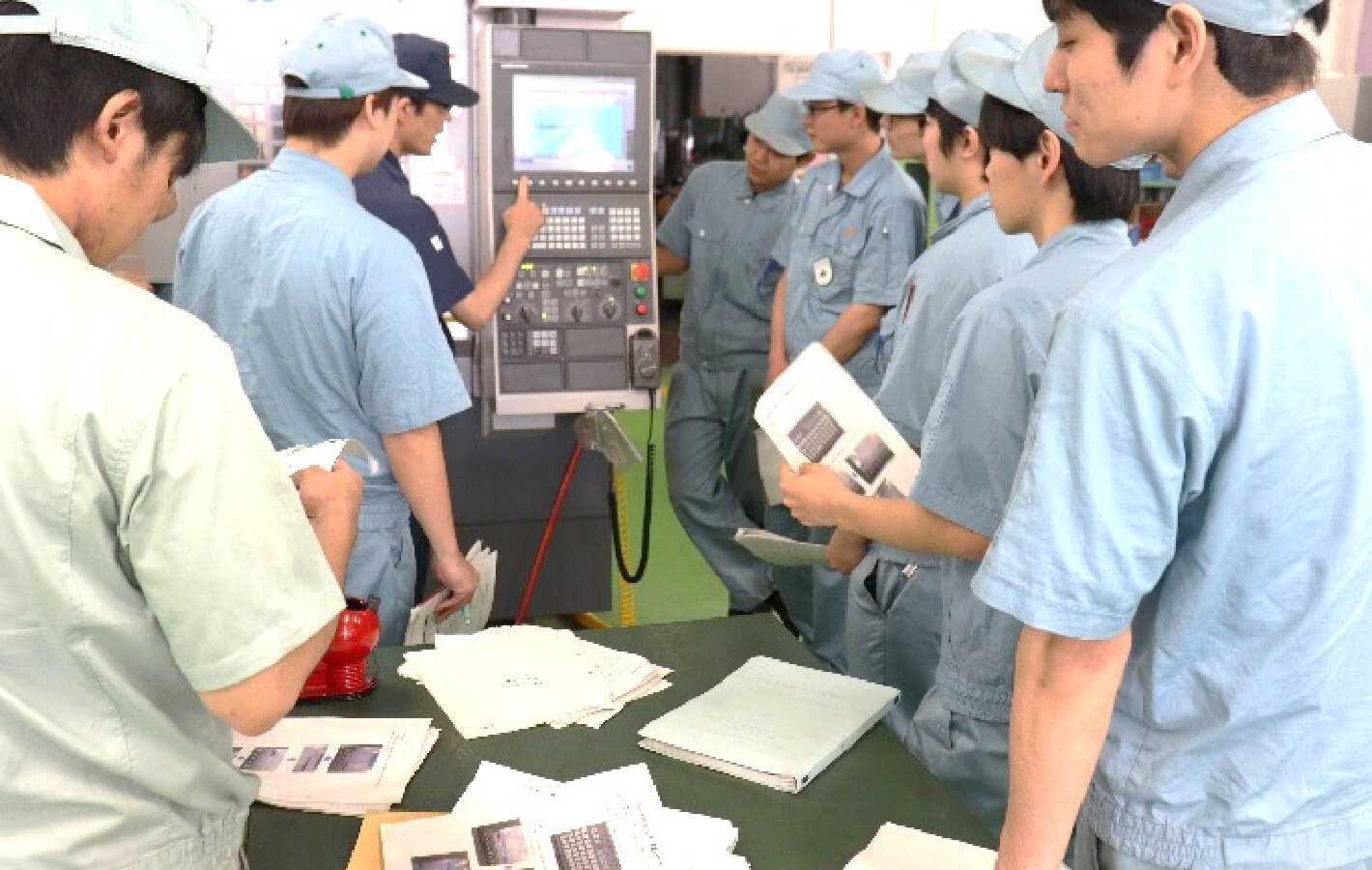
先生による説明

学生同士操作方法を確認しています。
実習の様子
(2019年6月14日)
電子情報技術科の2年では、1年で学んだハードウェア、ソフトウェアの技術をもとに、基板の設計から、実装、プログラミングまでを一人で行います。今回は、フォトリフレクタ(光センサー)とPICマイコンを使用してライントレースカーを製作します。フォトリフレクタ(光センサー)がラインの白、黒を識別して走行できるようにプログラミングします。
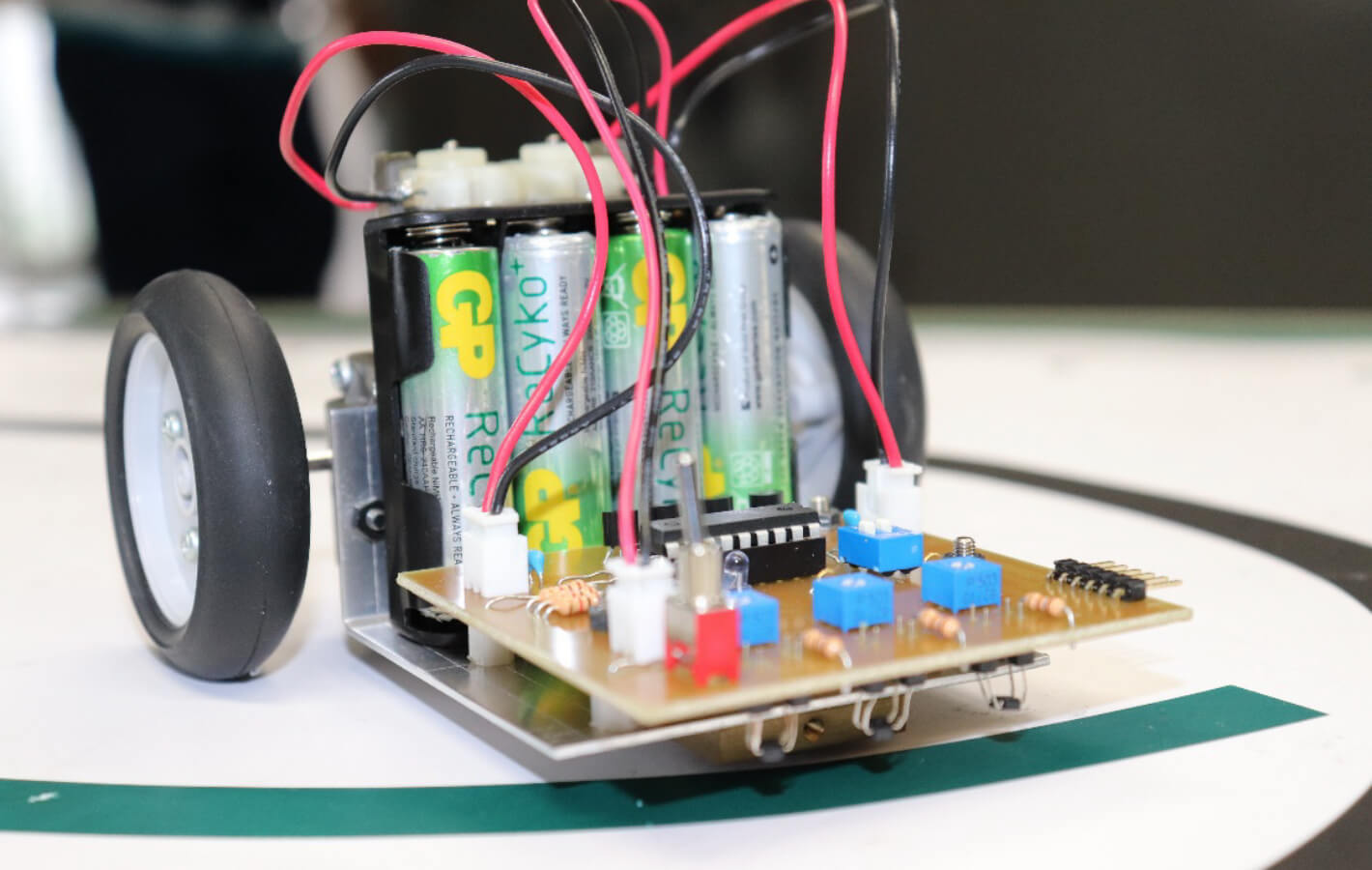
製作したライントレースカー
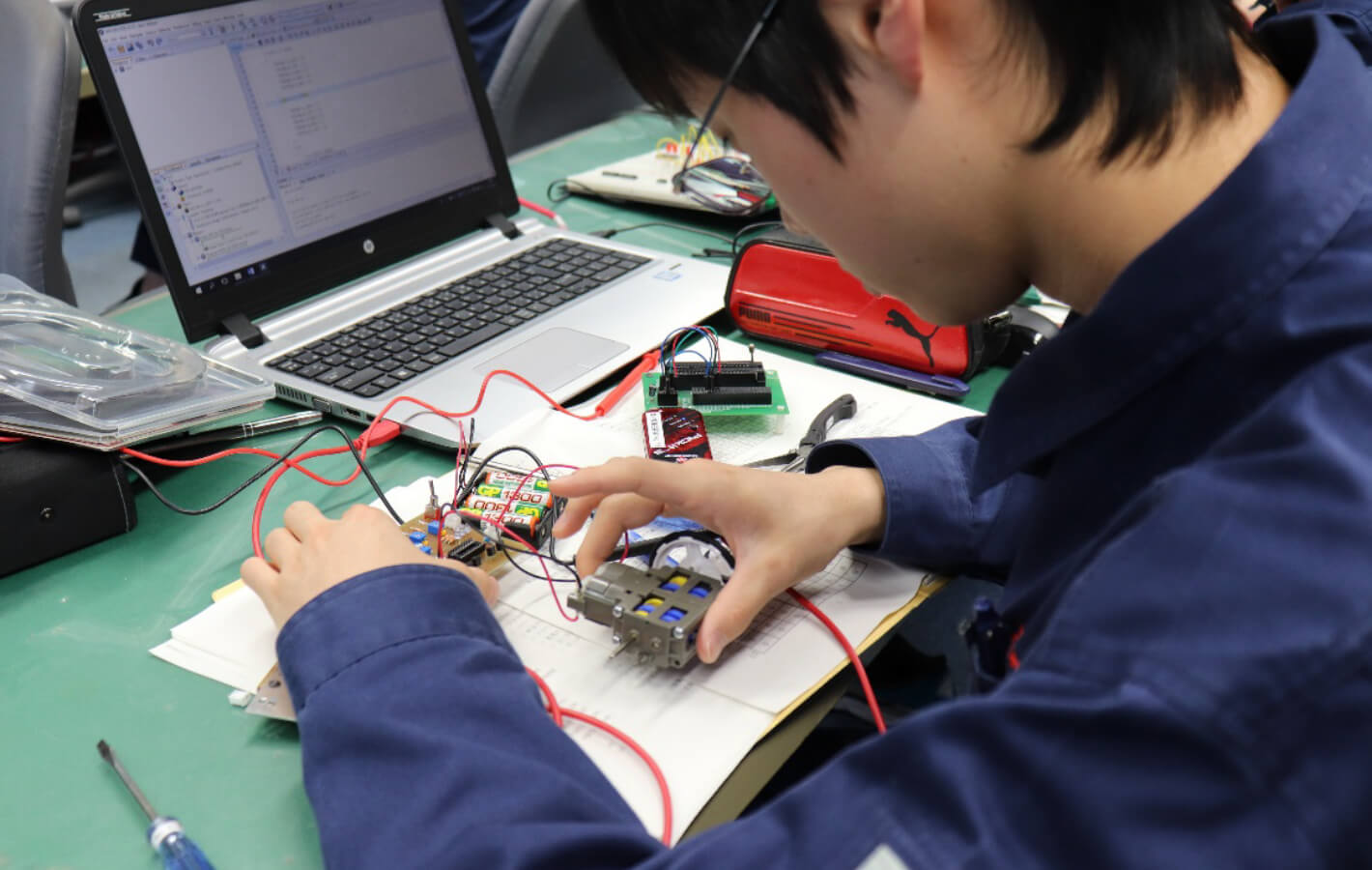
プログラミングなど調整中
(プログラミングソフトはMPLABを使用)
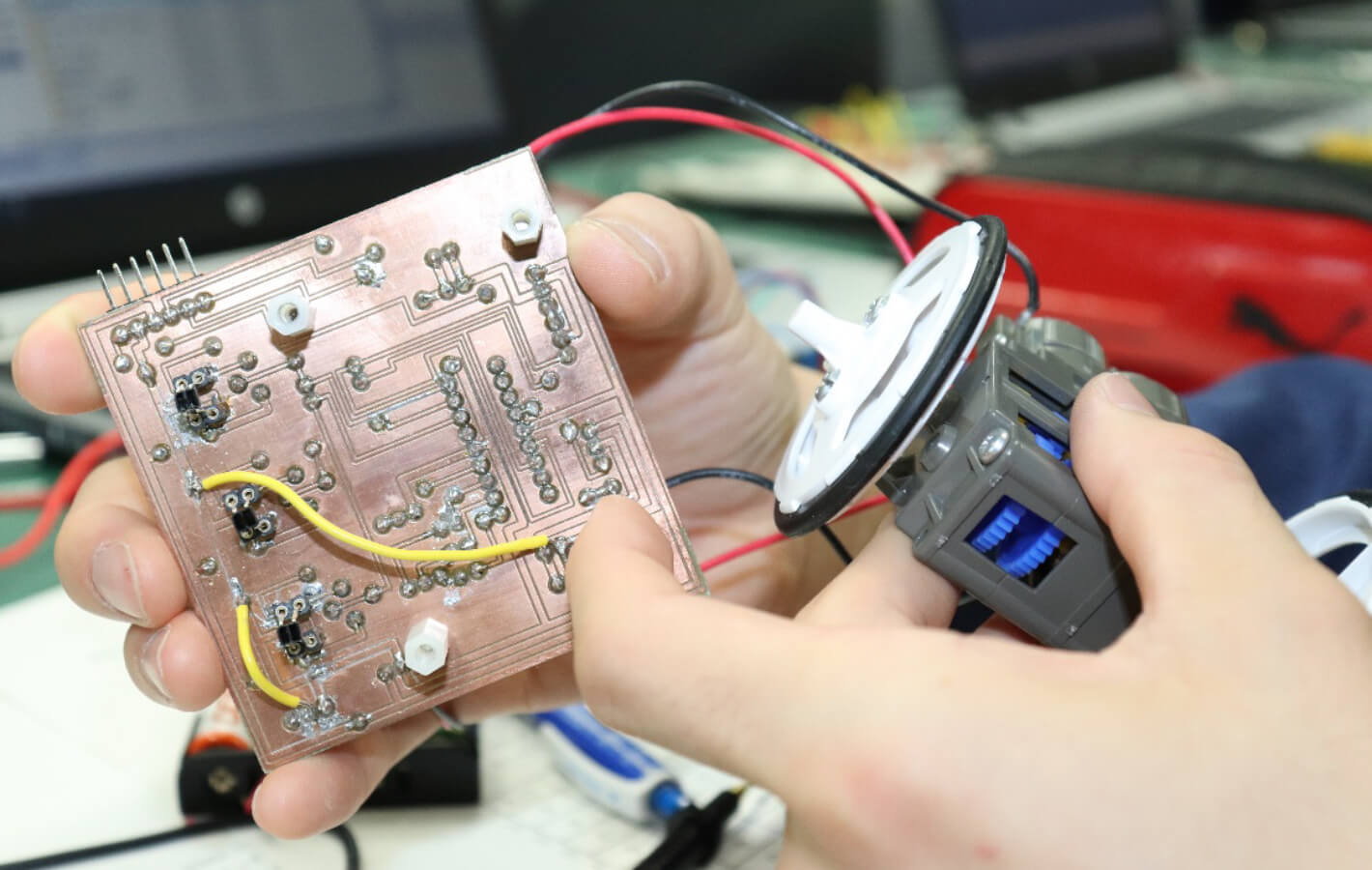
製作した基板
仕様書をもとに、自分で設計図を考え、基板から製作します。
基板の左側の3つの黒い部品がフォトリフレクタ(光センサー)
製作したライントレースカー
学生同士で出来具合を検証しています。
(2019年6月4日)
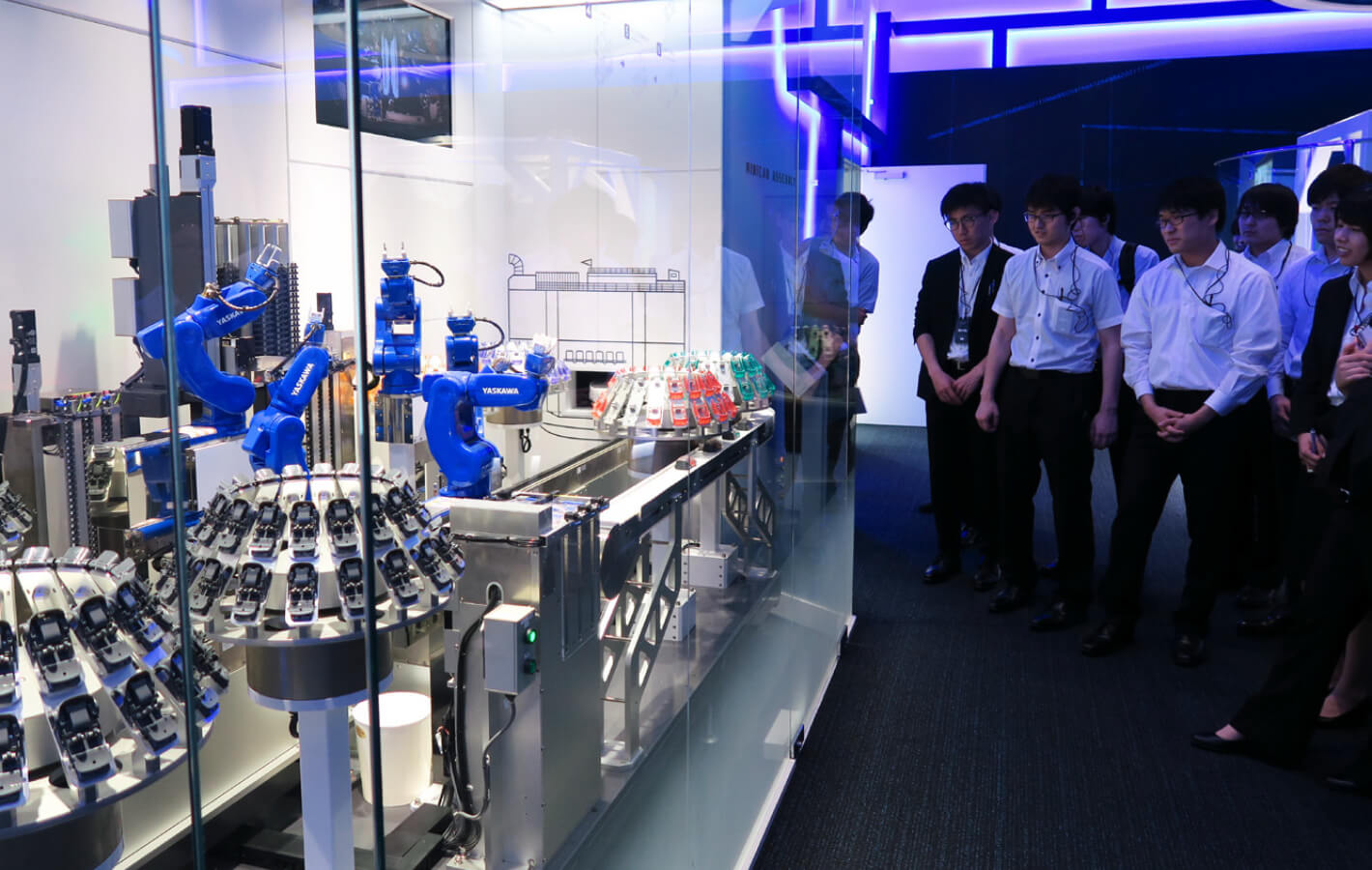
5月31日(金)、生産電子情報システム技術科1年生が「ロボット工学」の授業の一環として北九州市八幡西区にある「安川電機」を見学してきました。
安川電機では1960年代から人間とロボットが力を合わせて働く「協働工場」を追求しており、はじめにロボットとの協働を実現させた第1工場を見学しました(撮影不可)。
工場では人間とロボットが柵の無い状態で向かい合い、ロボットは部品を一定の力で圧入したり、グリスを一定の量注入したりする作業を担当していました。
その後、みらい館では双腕ロボットやパラレルリンクロボットとカード探しやもぐらたたきゲームで競い合い、素早く動くロボットの性能を体感することができました。

生産電子情報システム技術科1年生

安川電機100年史の説明

双腕ロボットとカード探し対決

パラレルリンクロボットともぐらたたき対決
ミニカーを組み立てる小型6軸ロボット

ルービックキューブを揃える双腕ロボット
(2019年6月3日)
5月26日(日)東京で開かれたNHKロボコン2019~ABUアジア・太平洋ロボコン選考会に出場。この大会には、東京大学校や京都大学校など予選で勝ち抜いた22チームが全国から参加。今回は、高速走行ロボットと4脚歩行ロボットが連携してゴールを目指すもので、かつてのモンゴル遊牧民の「馬による駅伝メッセンジャーシステム」がモチーフになっています。当校のチーム「ポリテク9」は、決勝トーナメントには出場できませんでしたが、4脚歩行ロボットのユニークな動きに観客から一斉に「ウォー」と声をいただき、注目を集めていました。4脚歩行ロボットの担当学生は「そのときは感動しました」と話していました。
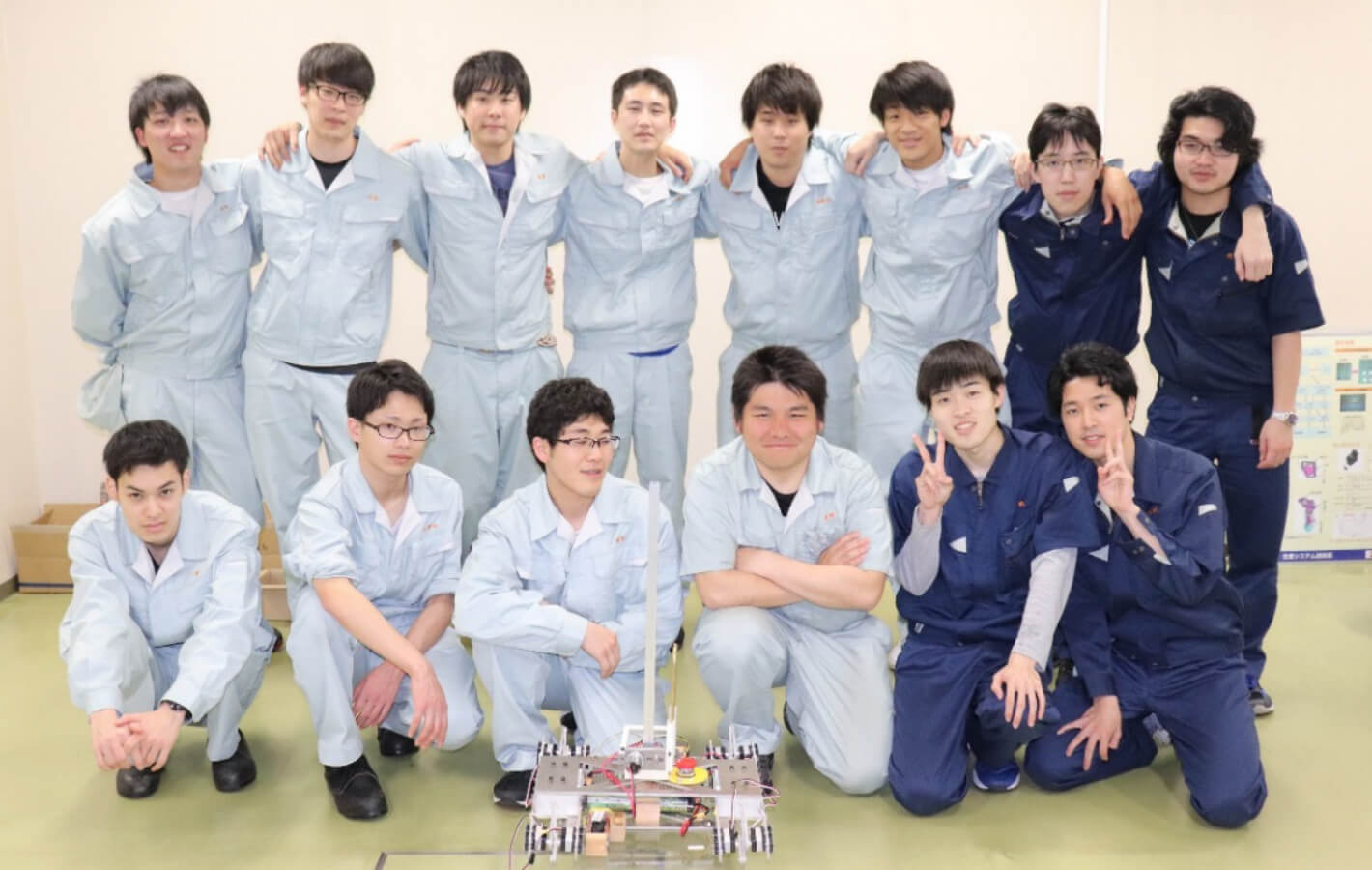
今回参加した「ポリテク9」の14名メンバー
(応用課程機械系電気系電子情報系の学生)
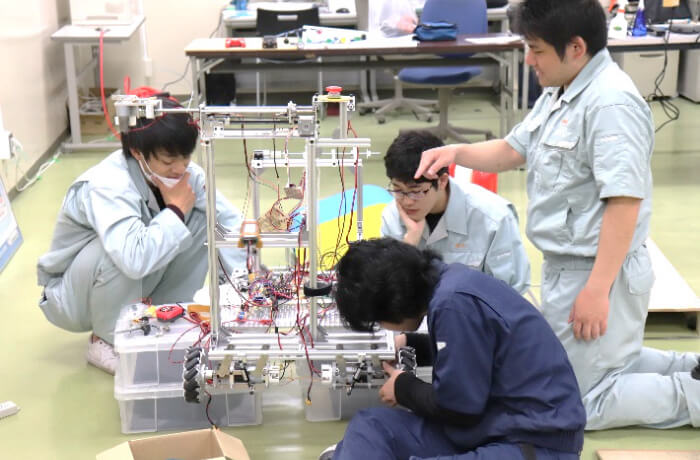

開発課題の部屋での最終調整の様子
プログラム担当、メカニック担当、電気系統担当の学生が意見を出し合っています。

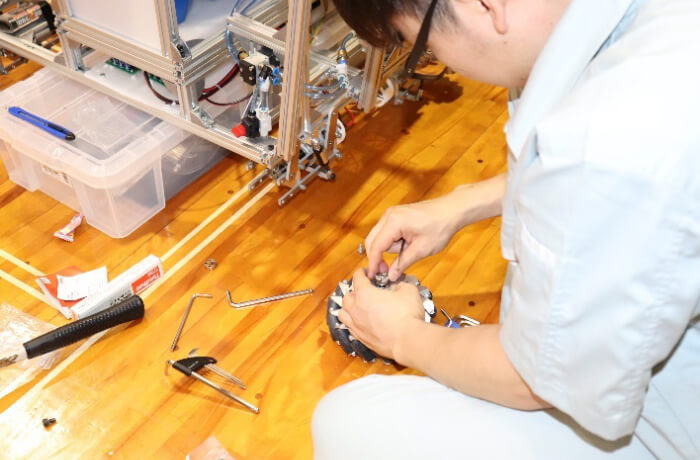
体育館での最終調整の様子メカニック担当の学生(右)
高速走行ロボットMR-1
4脚歩行ロボットMR-2

NHKの取材を受けました。
NHKニュースブリッジ北九州でその日の夕方放映されました。

壮行会で校長より激励を受けました。
大会当日、会場で紹介された当校の紹介ビデオです。
大会は8つの予選リーグがあり、予選リーグ中1チームが決勝トーナメントへ進みます。当校は予選Eグループで、早稲田大学校と東京工科大学校と対戦しました。予選通過は、早稲田大学校が果たし、決勝トーナメントで2位となりました。1位は、京都大学校でした。京都大学校は8月にモンゴルで開かれる大会に参加します。

大会会場片柳アリーナ(日本工学院専門学校東京)

開会式、右端が九州能開大
第一試合 対 東京工科大学校

6名の学生によるロボットのセッティング
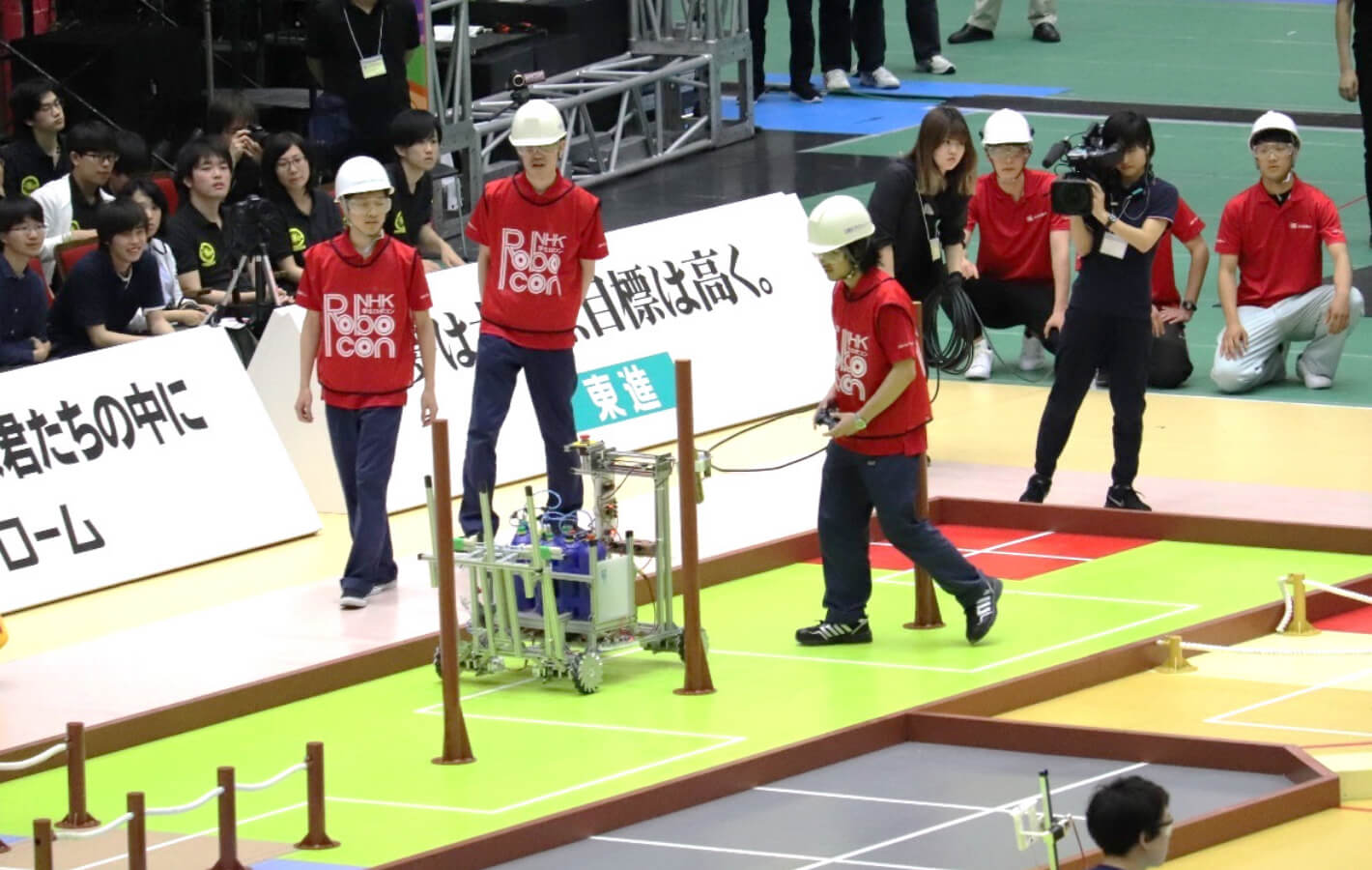
高速走行ロボットMR-1スタート(無線操縦ロボット)

ゲルゲ受け渡しのリトライ中

4脚歩行ロボットMR-2(自律型ロボット)
段差にトライ中

MR-2の動きを見守る3名のメカニック(後方)

MR-2リトライ
対 東京工科大 動画
第二試合 対 早稲田大学校

大会には6名参加しましたが、フィールドに出れるのは3名です。
他の3名はメカニックとして機器の調整をします。

対戦前の様子

高速走行ロボットMR-1スタート

エアーポンプが外れるアクシデント

心配そうに見守る3名のメカニック

すばやく修復することができリトライ

4脚走行ロボットMR-2段差にトライ中

MR-2リトライ
対 早稲田大学校 動画

応援に来ていただいた方々と参加メンバーと先生
当校では、NHKロボコン参加ロボットを開発課題の授業の中で製作しています。生産システム系3科(機械、電気、電子情報)の2年生(大学校4年相当)がチームで取り組み、1年生(大学校3年相当)の有志が主にパイロットとして参加します。 チームは、これから2020年NHKロボコンを目指し開発を進めますが、2年生は来年3月に修了するため、2020年NHKロボコンでは1次ビデオ審査まで関わり、1次ビデオ審査を通過した場合は、ロボットは1年生に引き継ぐこととなります。 学生は、このような大会に参加することで、技術の進歩とチームワークが培われています。当校では、積極的にこのような競技会へ参加しています。
(2019年6月3日)
5月25日(土)当校体育館において、学生自治会が企画したバレーボール大会が行われました。専門課程1年生から応用課程2年生まで、およそ130名の学生がチームに分かれ楽しいひと時を過ごしていました。



学生自治会主催バレーボール大会




![]()