総合制作・開発課題
専門課程 総合制作課題
総合制作課題は、専門課程のまとめとして、自ら設計・製作を行う課題実習です。テーマによっては、実用的な製品を目指したもの、既成品をベースに改良を加えその利用改善を目指したもの、レースや大会を目指したものなど多岐にわたります。制作を進める中では、個々に解決しなければいけない問題が色々あります。学生ひとりひとり、自らテーマの完成を目指して、自分の知識・技能をもって取り組むことで、それまで授業や実習であいまいだったことが明確にできます。
生産技術科・電気エネルギー制御科共同制作
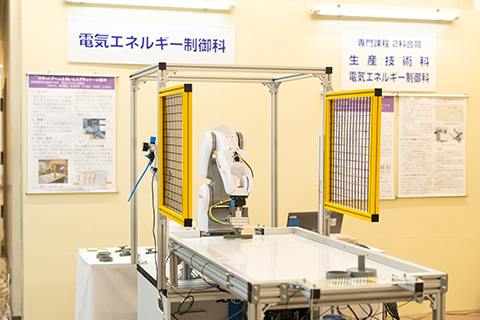
ロボットアームを用いたエアホッケーの製作
空気圧を使用したエアホッケー台を製作し、6軸ロボットアームを用いて人間と対戦できるようにしました。エアホッケー台にはセンサが組み込まれており、ロボットアームが連動します。
生産技術科 総合制作
特殊環境用途AGV(無人搬送車)の開発
地元企業との共同研究で取り組みました。共同研究企業先が期待する生産性の向上を搬送面から対策すべく、工場内の特殊な環境でも運用可能な無人搬送車(AGV)の開発を行いました。屋内GPSで位置情報を獲得、AGVが保有する工場内マップで行先を選定し、障害物を回避しつつ、一定速度で走行します。10%の勾配で、120kgを安定的に搬送できます。

金属製富山県地形モデルの製作
国土地理院には日本全国の地形データが無料で提供されています。これを利用して起伏に富んだ富山県の金属製モデルを製作します。また、複数のブロックに分けることで、パズル的な楽しみ方ができるようにして、イベント等での展示で活用できることを目指します。

電気エネルギー制御科 総合制作
PLCを利用したアミューズメントアトラクションの製作
アミューズメントパークのアトラクションである観覧車、メリーゴーランド、ジェットコースターの3つを製作し、PLCで制御して動かすことができます。

汎用型4軸直交ロボットの製作
令和2年度に制作した3軸直交ロボットに回転軸を1軸追加して、物体を掴むハンドを回転させることができる汎用型4軸直交ロボットを製作しました。

電子情報技術科 総合制作
VR・ARを活用したソフトウェアの開発
VRとは人工的に作られた空間に没入して体験することができる技術です。VRの仮想現実という点を活かし、実習環境が無くても安全に体験できるVR実習とVR校内探索システムを開発しました。

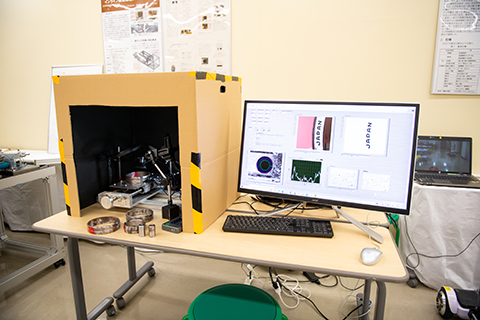
加工精度測定用画像処理システム
製品検査の主流が精度、人的コストの観点からAIを用いた外観検査システムに移り変わりつつあります。本開発では、未だ目視検査を行う企業にこれらを導入するとともにビックデータ分析の機能を加えたシステムを開発しました。
応用課程 開発課題
開発課題は、それぞれの専門分野の技術を有する3学科の学生でグループを構成し、協力・補完しあいながら企画から製作、試験や評価に至るまでの課程を経て制作をおこなう課題実習です。3科融合のワーキンググループ方式による卒業研究と言えるものであり、実際の生産現場での働き方を意識したものとなっています。
ソーラーカー車両の開発‐発電エネルギーの効率的利用‐
クリーンエネルギーの需要が今後高まる中、EV開発が注目されています。太陽光による発電エネルギーを効率的に利用できるソーラーカーの開発では、秋田県大潟村で開催されるワールドソーラーカーチャレンジを想定し、効率的なモータ、発電電力の安定化、軽量化、旋回性の効率化をポイントに取り組みました。

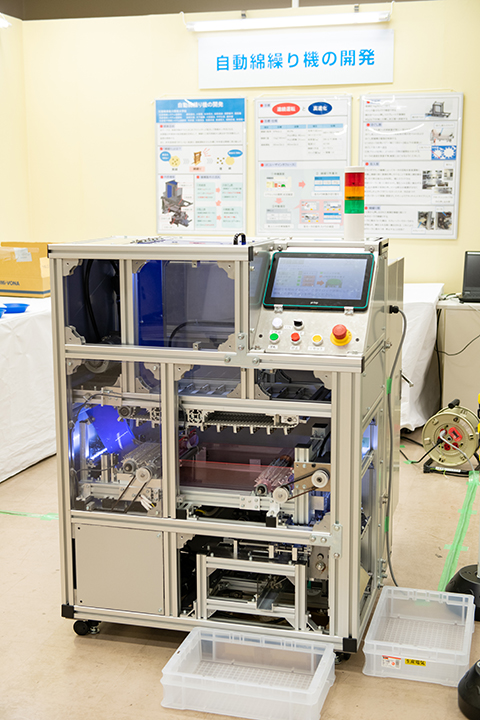
自動綿繰り機の開発
「わたはじめプロジェクト」という地域活動と協力し、取り組んでいるテーマになります。収穫された綿花(実綿)から,綿と種を取り分ける綿繰り作業は、作業者の大きな負担になっていることから、実綿の供給から排出までを自動化し、連続運転を可能とする装置の開発を目標としています。
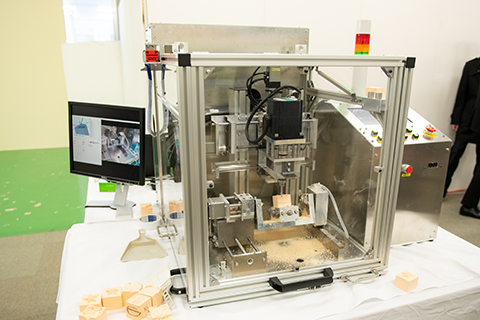
4軸同時制御彫刻機の開発
3軸直交と回転軸を同時に制御する「4軸同時制御彫刻機」の開発に取り組みました.4軸同時の制御を可能にすることで、連続的な曲面加工が可能です。
NCプログラムの読み込みや、安全機能の充実など様々な機能を搭載しています。
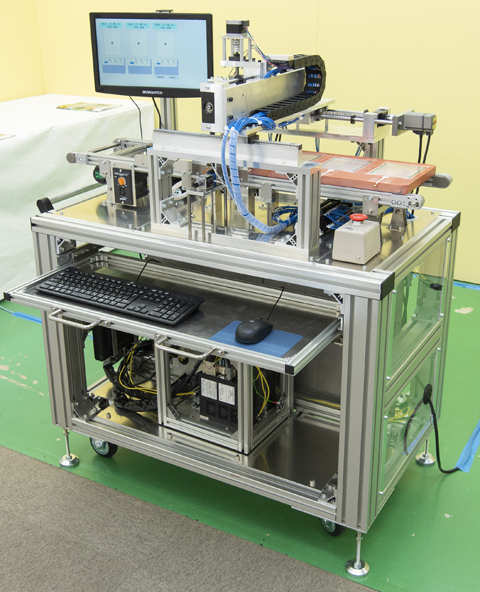
タッチスクリーン検査機の開発
タッチパネルの構成部品であるタッチスクリーンを自動で検査する装置を開発しました。検査を自動で行う装置を開発することで、人による検査より作業効率を高めることを目的としました。検査結果をグラフや表などで表示したり、検査中の軌跡や残り時間をモニターに表示したりすることができます。
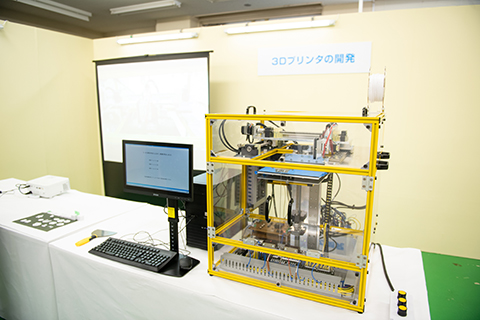
3Dプリンタの開発
1辺30mmの立方体を、10分以内に造形できる3Dプリンタを開発することを目指しました。造形完了時は、電子メールにより完了報告ができ、タッチモニタで状況を見ることができるようにしました。また安全にも配慮した設計にもなっています。
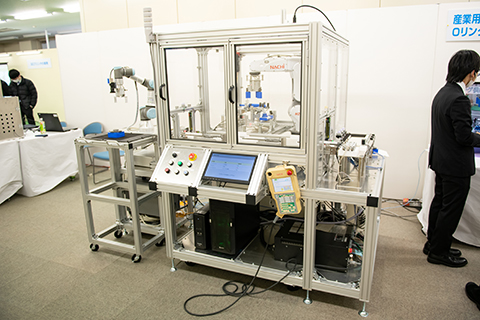
産業用ロボットを活用したOリング取り付けシステムの開発
産業用ロボットを活用し,波動歯車装置にOリングを取り付けるシステムを開発しました。ロボットハンドによるOリング取り付けのほか、Oリング供給ユニットや画像処理による検査システムを実装しています。