
No1 建築科
No2 生産系
No3 建築施工システム技術科
No4 電子情報技術科
No5 生産技術科
No6 電気エネルギー制御科

自律型トマトロボット
「トマ次郎_2019」
第6回トマトロボット競技会
2019年度開発課題のチームが製作した自律型トマト収穫ロボットです。2機のロボットが同時に動いてトマトを収穫します。今回は、収穫部にロボットハンドを新たに開発し、人の手のようにトマトを傷めないようにもぎ取ることを目指しました。やわらかいトマトを傷めずに収穫する難しさに直面しながら、試行錯誤を繰り返し、競技会ではファイナルステージへ進出することができました。

2台の産業用ロボットの連携
生産電気システム技術科 1年
PLCという産業用コントローラで、2台のロボットを協働して動作させています。
お互いのロボットが、信号のやり取りをしながらタイミングを取っているので、決してぶつかることはありません。

3台の産業用ロボットの連携
生産電気システム技術科 1年
PLCという産業用コントローラで、3台のロボットを協働して動作させています。
お互いのロボットが、信号のやり取りをしながらタイミングを取っているので、決してぶつかることはありません。
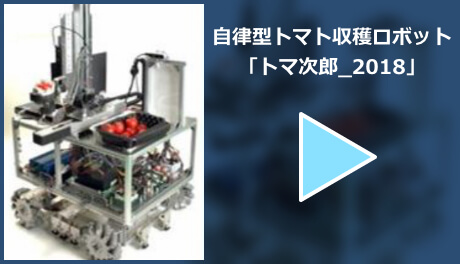
自律型トマト収穫ロボット
「トマ次郎_2018」
生産システム系3科(機械、電気、電子情報)2019.10.21
2018年度開発課題で製作した自律型トマト収穫ロボットです。
実用化を目指して2019年度も開発を続けています。
「トマ次郎」は平成30年12月に北九州市若松区で開催されたトマトロボット競技会において3つの賞を受賞しました。(フリースタイル優勝、総合2位、響灘菜園賞)

NHKロボコン2019
~ABUアジア・太平洋ロボコン選考会~
九州職業能力開発大学校紹介ビデオ
生産システム系3科(機械、電気、電子情報)2019.5.26
当校では、NHKロボコン参加ロボットを開発課題の授業の中で製作しています。生産システム系3科(機械、電気、電子情報)の2年生(大学4年次相当)がチームで取り組みます。今回のチームは、これから2020年NHKロボコンを目指し開発を進めますが、来年3月に修了するため、2020年NHKロボコンでは1次ビデオ審査まで関わり、1次ビデオ審査を通過した場合は、そのロボットは後輩に引き継がれます。今回も、今年4月に修了した先輩から引き継いだロボットで参加しました。
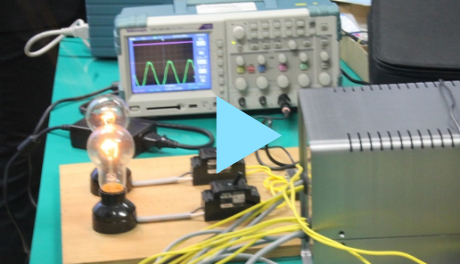
パワーコンディショナの
動作デモンストレーション
生産電気システム技術科1年(2019.2.7)
標準課題において、4~5名のグループでパワーコンディショナを製作しました。

パワーコンディショナ製作実習の内容
生産電気システム技術科1年(2019.2.7)
標準課題において、4~5名のグループでパワーコンディショナを製作しました。

ETロボコン2018ガレッジニア部門
「洗濯物カバー」
生産システム系3科(機械、電気、電子情報)2018.10.14
洗濯物カバー
雨が降ると自動にカバーが閉じる優れものです。
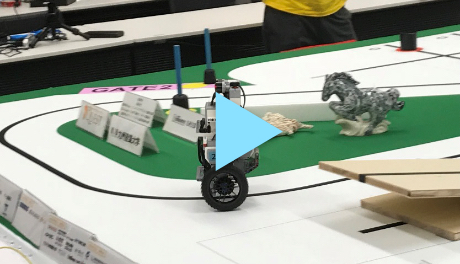
ETロボコン2018デベロッパー部門
「Lコース」
生産システム系3科(機械、電気、電子情報)2018.10.14
ETロボコン
デベロッパー部門プライマリークラス出場
Lコース
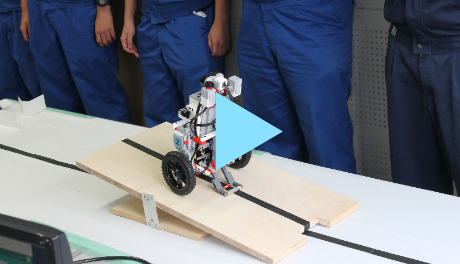
ETロボコン2018デベロッパー部門
「Rコース」
生産システム系3科(機械、電気、電子情報)2018.10.14
ETロボコン
デベロッパー部門プライマリークラス出場
Rコース
走行競技のタイムは全国第2位でした。

電動カート製作
生産電気システム技術科
既製品のボディーとシャーシを利用して、モータ、制御(コントロール)回路は、学生が設計・製作したもの。また、モータをコントロールするソフトウェアも学生によるものです。

トマト収穫ロボット「トマ太郎2017」
生産システム系(機械、電気、電子情報) 2017.12
当大学校で開発している「トマト収穫ロボット」です。
毎年、北九州市で開催されている「トマトロボット競技会」に参加しています。
2017年は、レール部門で3位になりました。
トマト収穫ロボット「ニャニャ」
生産システム系(機械、電気、電子情報) 2017.12
当大学校で開発している「トマト収穫ロボット」です。
毎年、北九州市で開催されている「トマトロボット競技会」に参加しています。
2017年は、レール部門で4位になりました。

2018紙コップアート
建築科1年 (2018.7.11)
紙コップ数千個を使い、4つのテーマでアート作品を制作しました。

2018NHKロボコン2次審査ビデオ
生産システム系3科(機械、電気、電子情報)(2018.4)
2018NHKロボコンの2次審査ビデオです。
惜しくも、本選には進めませんでしたが、基本動作は、しっかり出来てます。

Techno-Ocean2018
水中ロボット競技会AUV部門
生産システム系3科(機械、電気、電子情報)(2018.5.27)
神戸ポートアイランスポーツセンターで行なわれた水中ロボット競技会において、
準優勝をいただきました。

ETロボコン 2017 出場
生産システム系3科(機械、電気、電子情報)(2017.9.24)
九州北地区大会でIPA賞を受賞しました。
ETロボコンとは、プログラミングの技術を競うものです。
そのため、各チームとも同じロボットをを使って競技に挑みます。

紙コップアート実習 2017
建築科1年(2017.7)
毎年、夏休み前の集中実習において、当校体育館にて紙コップを使って造形の実習を行なっています。 バランス感覚、光と影、調和など建築をデザインする上で必要な感覚と、チームワークを楽しんで学びます。

全方向移動型ロボット
生産機械システム技術科 3年生(2016.12)
開発課題において、5人で一つのチームを作り、全方向移動型ロボットを開発しました。

NHK 学生ロボコン 2016 本戦出場
生産システム系3科(機械、電気、電子情報)(2016.7.10)
これは、本戦出場の予告ビデオです。
本戦では、予選通過は出来ませんでしたが、特別賞をいただくことができました。

紙コップアート実習 2016
建築科1年(2016.7)
毎年、夏休み前の集中実習において、当校体育館にて紙コップを使って造形の実習を行なっています。 バランス感覚、光と影、調和など建築をデザインする上で必要な感覚と、チームワークを楽しんで学びます。

施盤加工実習
生産技術科(2016.7)
旋盤加工技能検定2級検査試験の内容についてのビデオです。
当大学校では、生産技術科2年生が毎年7月に検定を受け、
多数の学生が合格しています。

ポリテックビジョン:ロボット競技会
ポリテクビジョン2016 ロボット競技会
当大学校で行なわれている、ポリテクビジョンにおけるロボット競技会の様子です。ピンポン玉を取得し、的に投げ入れるものです。 参加校は、沖縄職業能力開発大学校、熊本県立技術短期大学校、大分県立工科短期大学校、川内職業能力開発短期大学校、当大学校です。
![]()





